

Motion planning system for biped robot
A biped robot, motion planning technology, applied in the transformation of motion planning system, stand up motion planning system field, to achieve the effect of enhanced adaptability, ingenious design and excellent performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
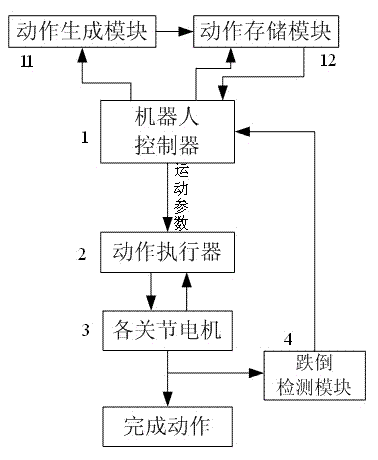
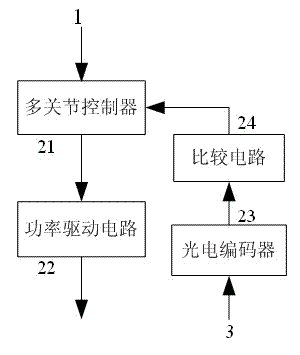
[0024] The principle diagram of the present invention is as figure 1 As shown, the motion planning system of the biped robot of the present invention includes a robot controller 1 and an action executor 2, the control signal output end of the robot controller 1 is connected with the signal input end of the action executor 2, and the action executor 2 The signal output end of each joint motor 3 that drives each joint motion is connected to the signal output end of each joint, and the signal output end of the fall detection module 4 that detects each joint motion condition is connected to the signal input end of the robot controller 1.
[0025] In this embodiment, the above joint motors 3 are servo motors.
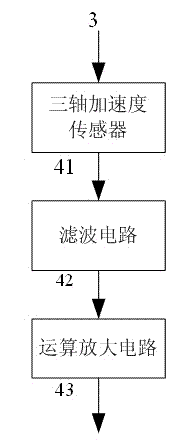
[0026] In this embodiment, the above-mentioned fall detection module 4 includes a three-axis acceleration sensor 41, a filter circuit 42 and an operational amplifier circuit 43, wherein the signal output terminal of the three-axis acceleration sensor is connected to the inpu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More