

Ground control system applicable to rotor-wing unmanned aerial vehicle
A technology of unmanned rotor and ground control, applied in the direction of attitude control, etc., can solve the problems of strong nonlinearity, difficulty in determining the dynamic model of small rotor UAV, and high self-coupling, so as to reduce the interference of the control system and shorten the debugging Cycle, the effect of eliminating high-frequency vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail below in conjunction with the accompanying drawings.
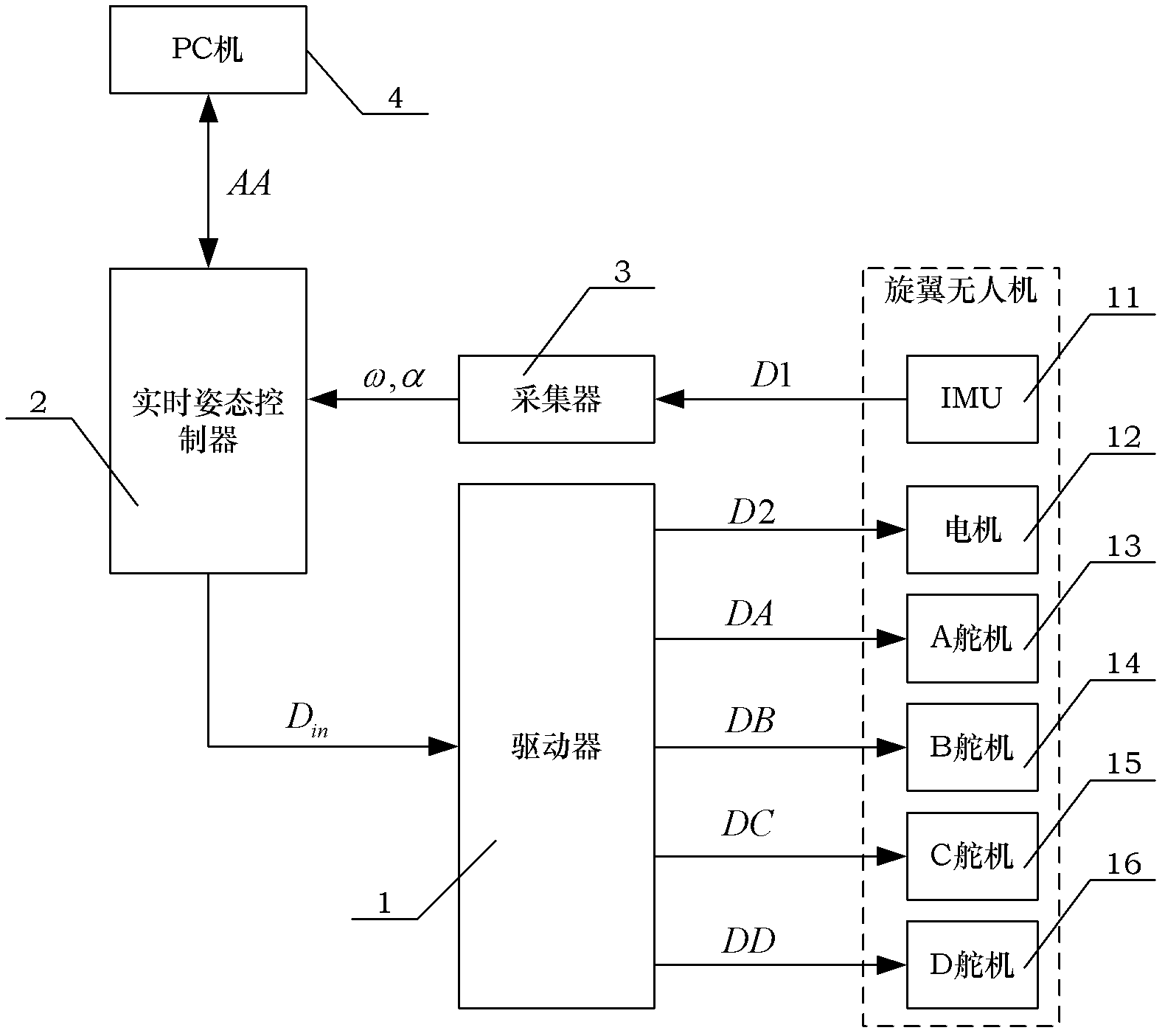
[0017] see figure 1 As shown, a ground control system applicable to a rotor UAV of the present invention includes a PC 4 , a real-time attitude controller 2 , an SPI communication collector 3 and a driver 1 . On the one hand, the driver 1 receives the motion command Din output by the real-time attitude controller 2, and on the other hand, according to the motion command Din, respectively outputs the motor control signal D2 to drive the motor 12 to move, the A-th steering gear signal DA to drive the A steering gear 13 to move, The B-th steering gear signal DB drives the B steering gear 14 to move, the C-th steering gear signal DC drives the C steering gear 15 to move, and the D-th steering gear signal DD drives the D steering gear 16 to move; the SPI communication collector 3 collects on the one hand The parameter information D1 measured by the inertial measu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More