

Dynamic balance manipulator
A technology of mechanical arm and swing mechanism, applied in the direction of manipulator, claw arm, joint, etc., which can solve the problems of increased burden on the system and low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
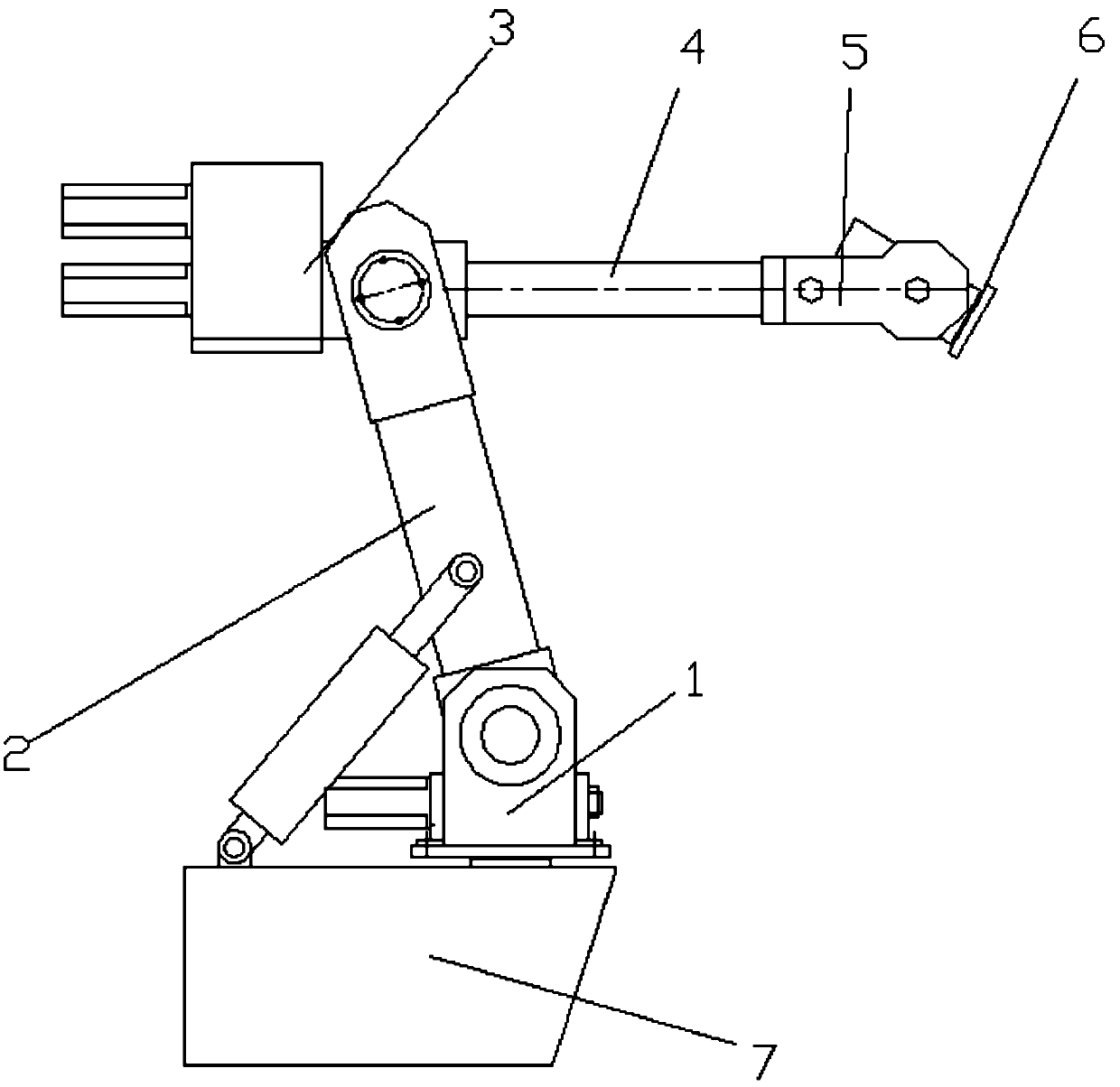
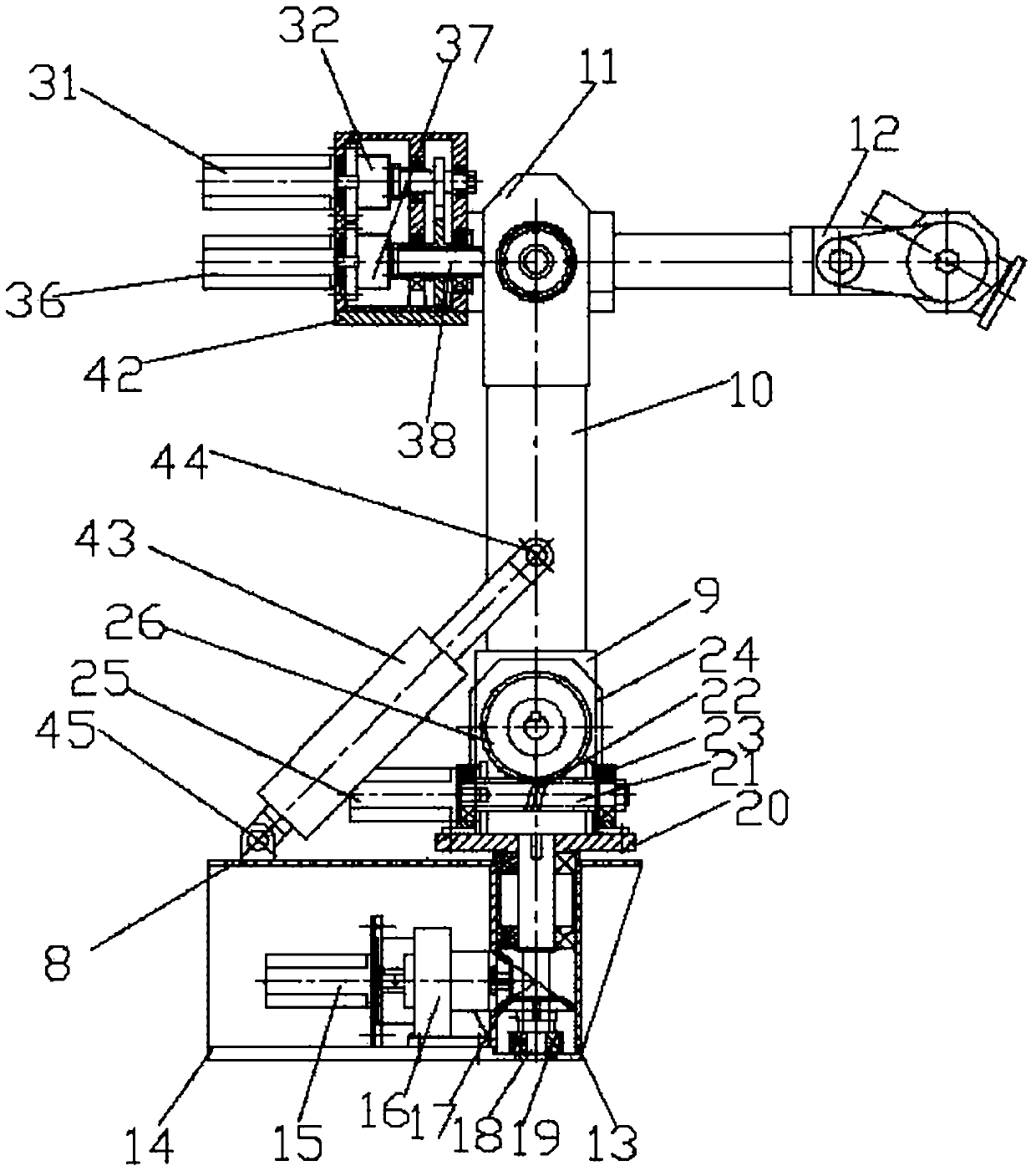
[0029] Such as figure 1 and 2 As shown, the dynamic balancing mechanical arm of the present invention comprises a shoulder joint structure 1, a large arm structure 2, an elbow joint structure 3, a forearm structure 4, a wrist joint structure 5 and a clamping hand structure 6. The arm structure 2 connects the shoulder joint structure 1 and the elbow joint structure 3, the forearm structure 4 connects the elbow joint structure 3 and the wrist joint structure 5, and the clamping hand structure 6 is installed on the wrist joint structure 5, It also includes a base structure 7 installed on the shoulder joint structure 1, the base structure 7 includes a base body 8 and a first rotation mechanism installed inside the base body 8, the first rotation mechanism is fixedly connected to the base body 8, And with the shoulder joint structure 1 transmissio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More