

Humanoid robot with function of interchanging double-foot walking with wheeled moving
A humanoid robot and robot technology, which is applied in the field of humanoid robots and can solve the problems of humanoid robots that do not have the ability to move and operate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
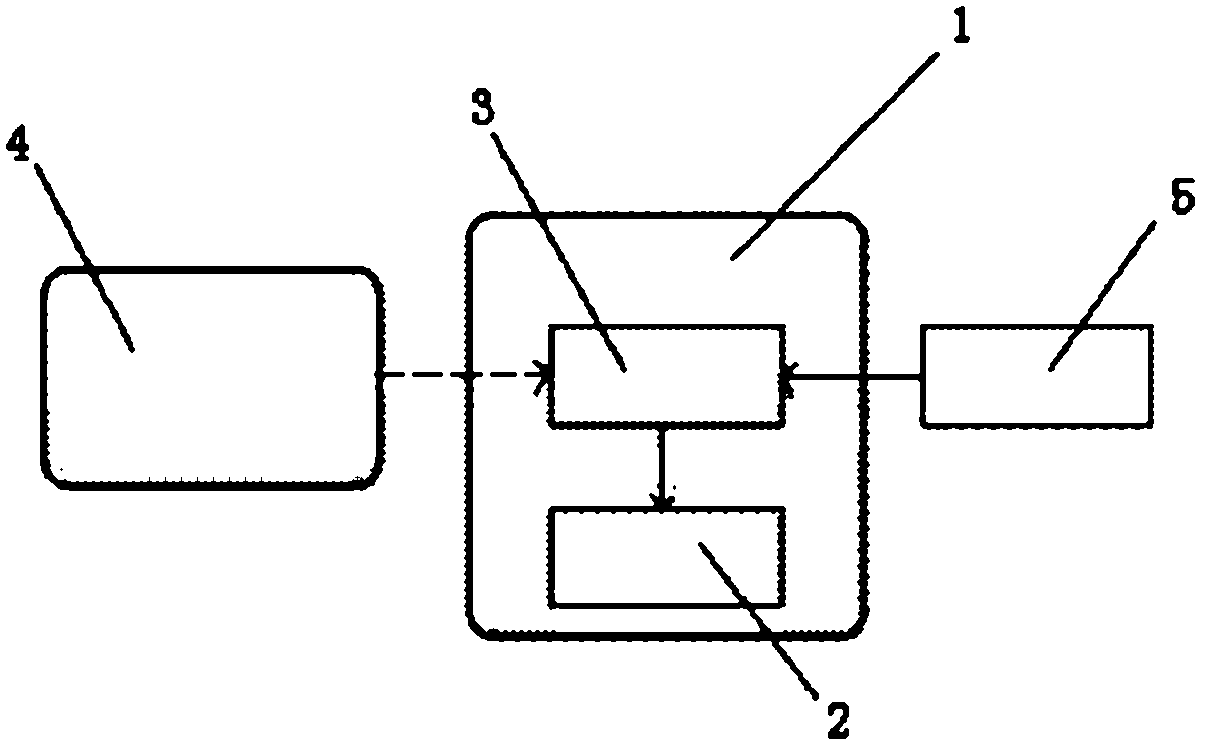
[0036] Such as figure 1 As shown, the humanoid robot provided by the present invention has the function of bipedal walking and wheeled mobile interchanging, which belongs to the intelligent mobile robot system of humanoid, including: a robot body 1, composed of a driver 2 and a controller 3, the driver 2 The controller 3 is connected through the bus, and the drive control signal output by the controller 3 is accepted; the remote control device 4 is connected with the controller 3 of the robot body 1 through wireless communication; the ranging sensor 5 is connected with the controller 3 of the robot body 1 through the bus.
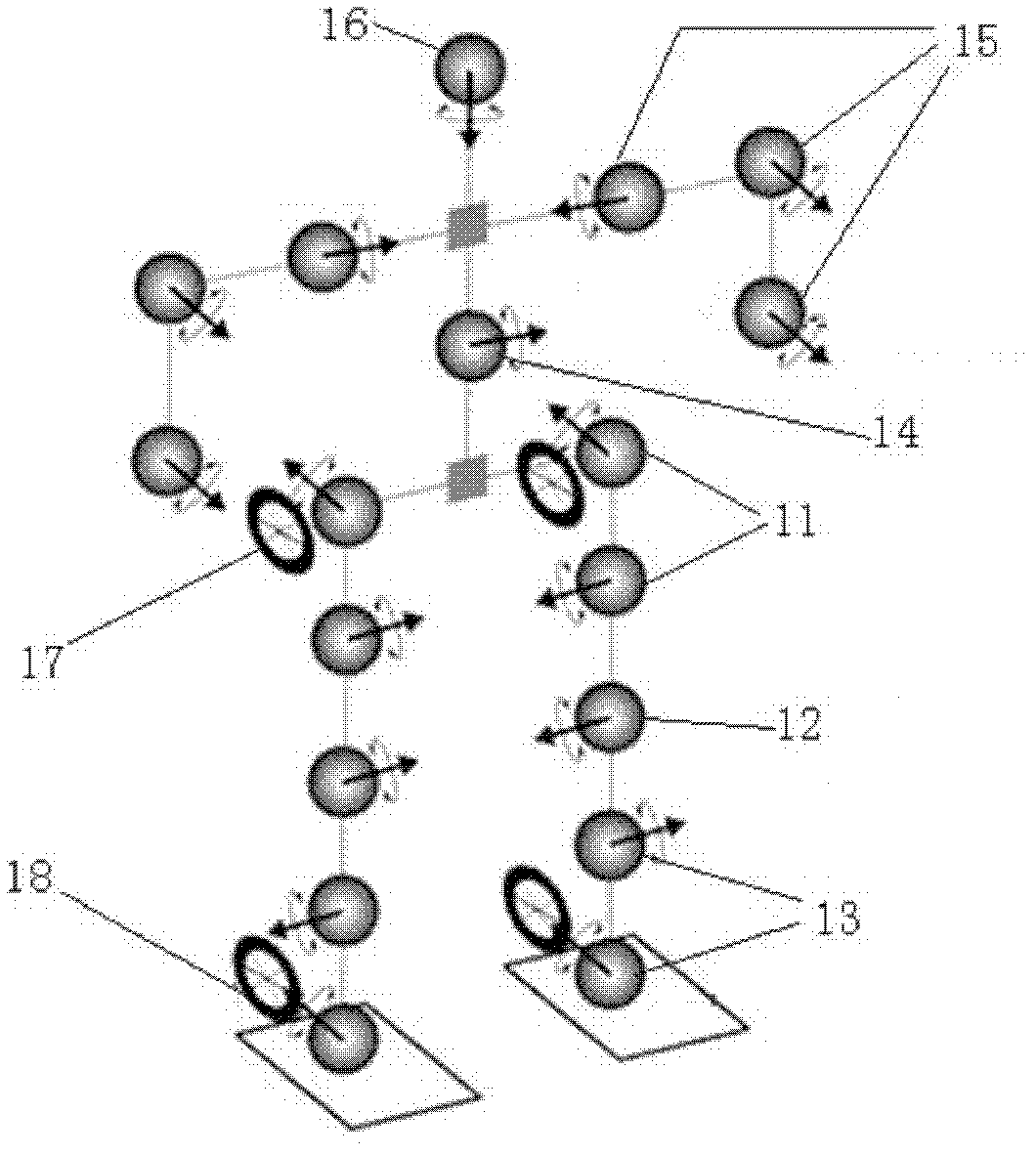
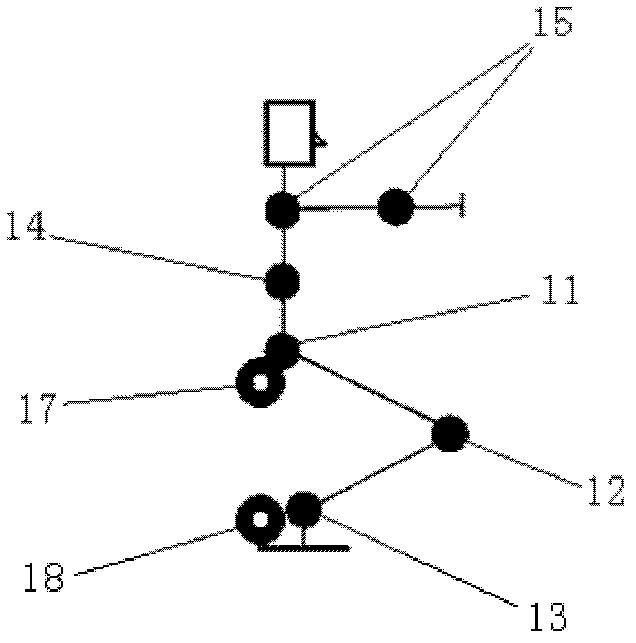
[0037] The robot body 1 is composed of mechanical structure connections, and has the characteristics of a humanoid robot, including ankle joints 13, knee joints 12, hip joints 11, waist joints 14, shoulder joints, elbow joints 15, and head 16. The movement of each joint is controlled by the steering gear. Servo motor implementation. The robot combines bipe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More