

Under-actuated manipulator claw for picking fruits and vegetables
A robotic claw and under-actuated technology, which is applied in the direction of picking machines, manipulators, program-controlled manipulators, etc., can solve the problems of manual work, low picking automation, time concentration, etc., and achieve strong flexibility, easy operation and maintenance, and simple control. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Further illustrate the present invention below in conjunction with accompanying drawing:
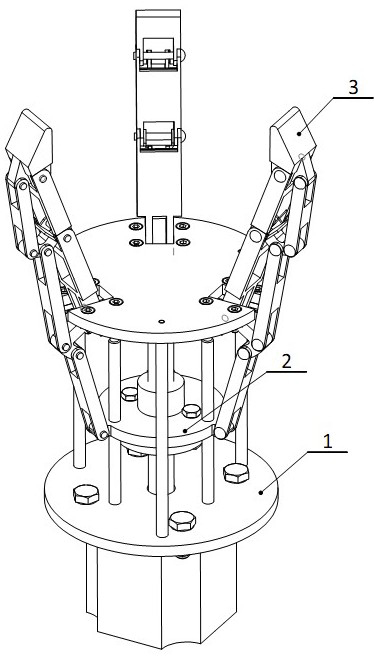
[0020] Such as figure 1 As shown, the driving mechanical gripper of the present invention mainly includes a frame 1 , a driving transmission mechanism 2 and a finger mechanism 3 .
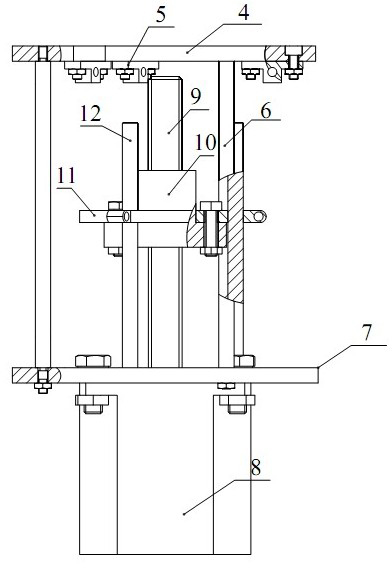
[0021] Such as figure 2 As shown, the frame 1 includes an upper base 4, a finger holder 5, a support column 6 and a lower base 7; the upper base 4 is connected to one end of the support column 6 by a stud, and the lower base 7 is connected to the other end of the support column 6 by a bolt; The finger holder 5 is connected with the upper base 4 by bolts, and is located below the upper base 4, and the frame 1 is connected with the stepper motor 8 by bolts.
[0022] The driving transmission mechanism 2 includes a stepping motor 8, a screw rod 9, a nut 10, a lifting platform 11 and a guide column 12; the screw rod 9 is fixed directly above the stepping motor 8; 7 stud connections. In the working stat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More