

Joint torque sensor based on elastic beam
A technology of torque sensor and elastic beam, which is applied in the field of joint torque sensor and can solve problems such as torque measurement at the end of the joint
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
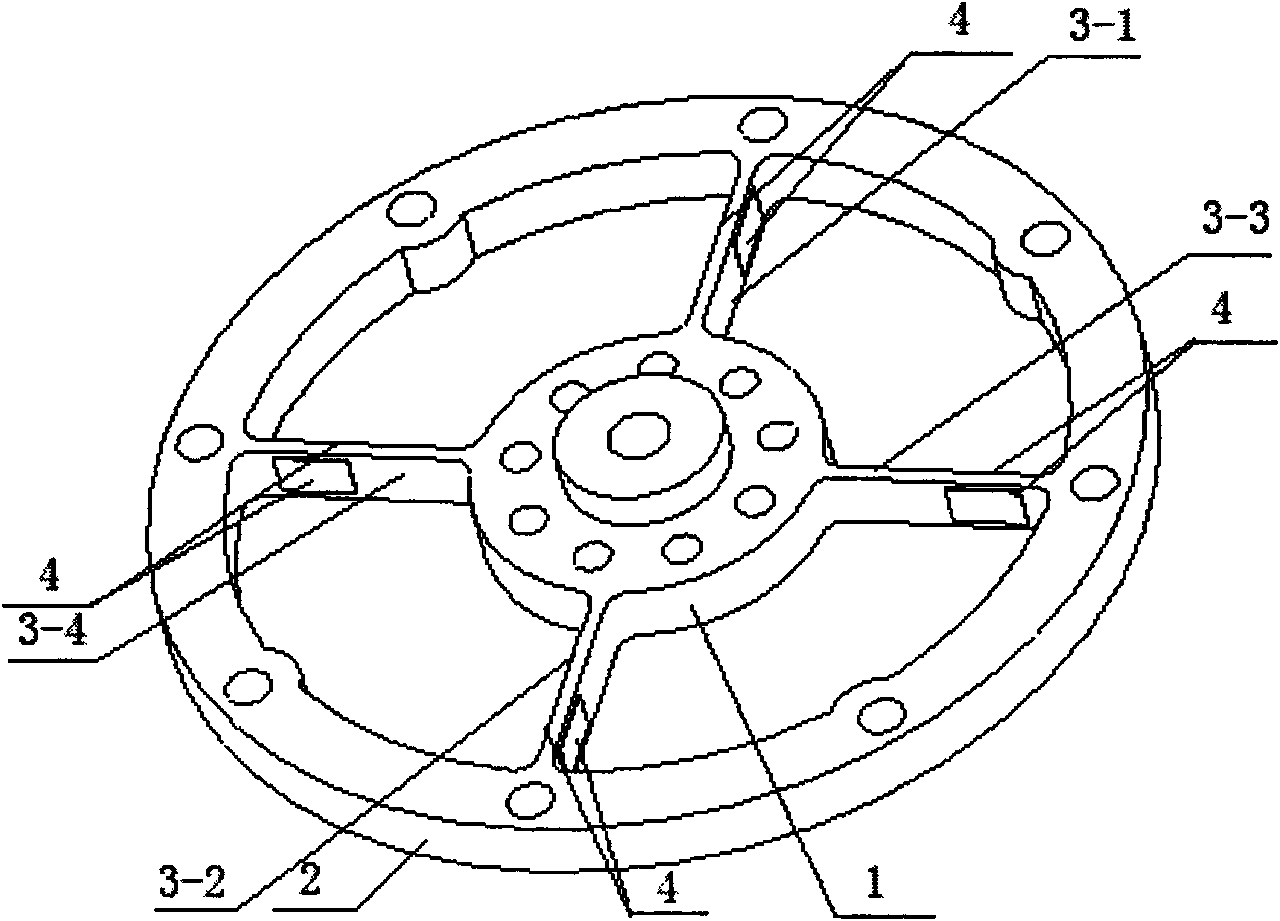
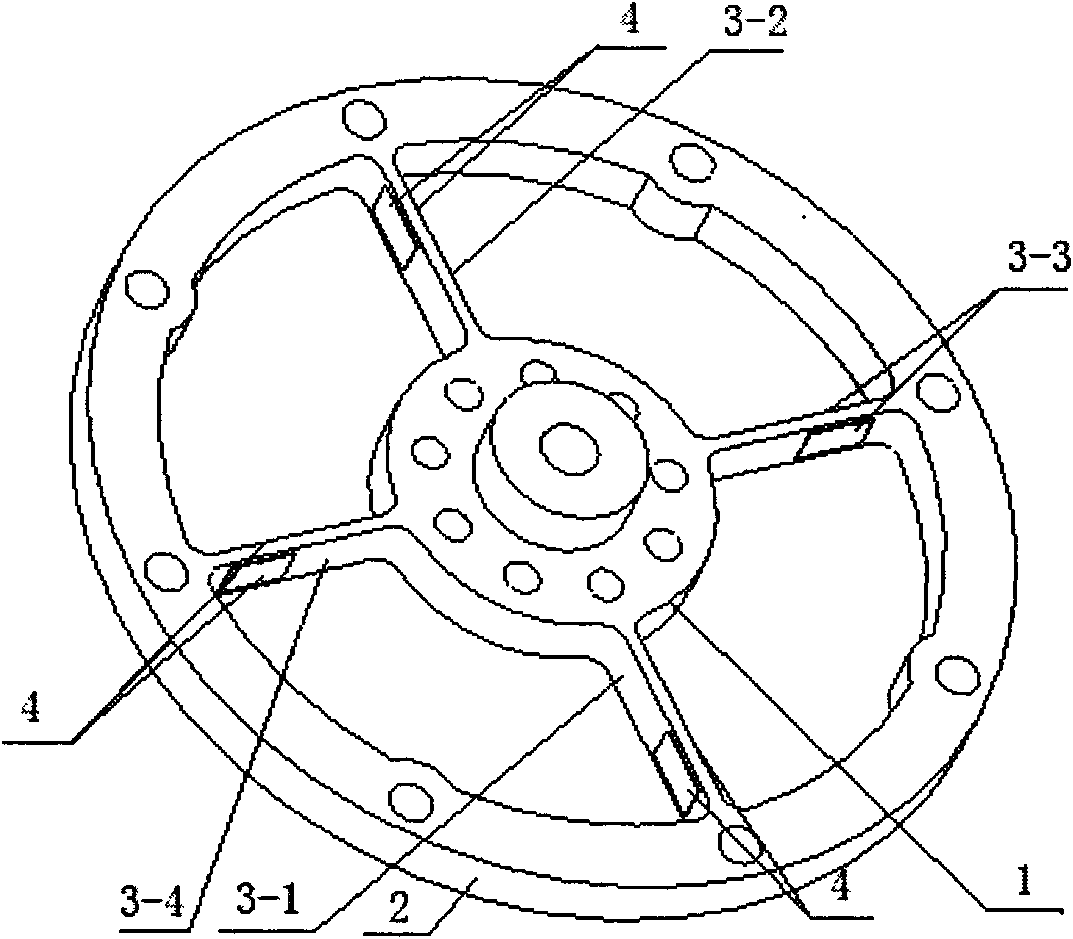
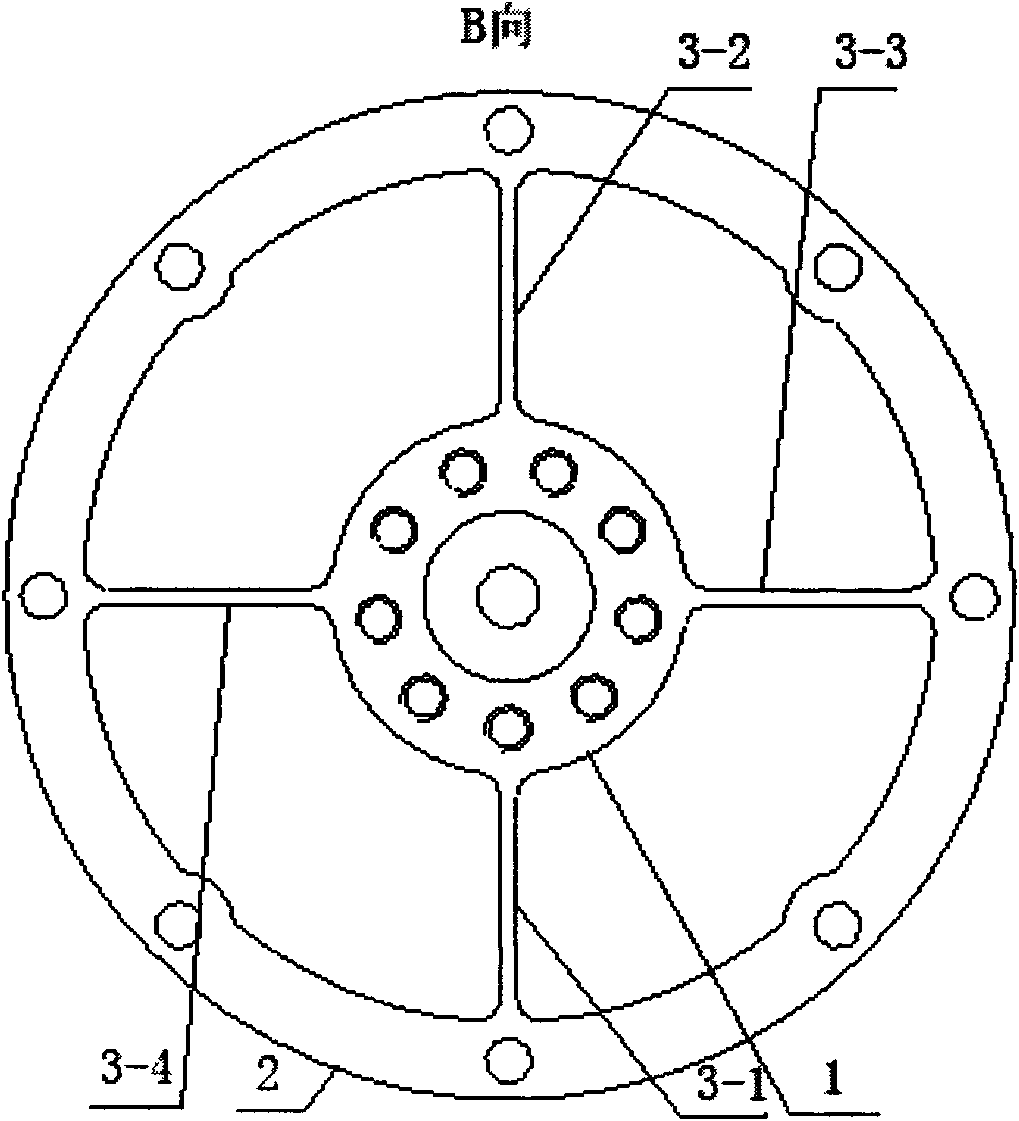
[0007] Specific implementation mode one: (see Figure 1-Figure 3 ) This embodiment includes an inner wheel (1), an outer wheel (2), a sensor strain beam (3) and a strain gauge (4). There are four sensor strain beams (3), namely No. 1 strain beam (3-1), No. 2 strain beam (3-2), No. 3 strain beam (3-3) and No. 4 strain beam (3-4 ). The two ends of No. 1 strain beam (3-1), No. 2 strain beam (3-2), No. 3 strain beam (3-3) and No. 4 strain beam (3-4) are connected with the inner wheel (1) respectively. The outer edge and the outer edge of the outer wheel (2) are fixedly connected as one and distributed symmetrically in a 90° cross along the circumference of the inner wheel (1); the strain gauges (4) are eight, and the No. 1 strain beam (3-1) , No. 2 strain beam (3-2), No. 3 strain beam (3-3) and No. 4 strain beam (3-4) fixed two strain gauges (4) respectively, No. 1 strain beam (3-1) and The four strain gauges (4) of the No. 2 strain beam (3-2) constitute the whole bridge one, a...
specific Embodiment approach 2
[0008] Specific implementation mode two: (see Figure 1-Figure 3 ) The difference between this embodiment and the specific embodiment 1 is that the planes where the inner wheel 1 and the outer wheel 2 are located are parallel and on the same plane.
specific Embodiment approach 3
[0009] Specific implementation mode three: (see Figure 1-Figure 3 ) The difference between this embodiment and the specific embodiment one is that it is fixed on No. 1 strain beam (3-1), No. 2 strain beam (3-2, No. 3 strain beam (3-3) and No. -4) eight strain gauges are parallel in pairs and are all perpendicular to the plane where the inner wheel and the outer wheel are. Other compositions and connection methods are the same as those in Embodiment 1. No. 1 strain beam (3-1) described in this embodiment 1, No. 2 strain beam (3-2), No. 3 strain beam (3-3) and No. 4 strain beam (3-4) all stick strain gauges on their two sides, and the strain gauges adopt the full-plane pasting method, which is convenient for pasting.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More