

Multi-degree-of-freedom single-wound-hole robot flexible hand for celiac minimally invasive surgery
A technology of minimally invasive surgery and degrees of freedom, applied in the field of manipulators, can solve the problems of easy interference caused by instruments, increased costs, and loss of 3D real vision in the surgical field, achieving the effect of enhancing convenience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The embodiments of the present invention are described in detail below in conjunction with the accompanying drawings: this embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following the described embodiment.
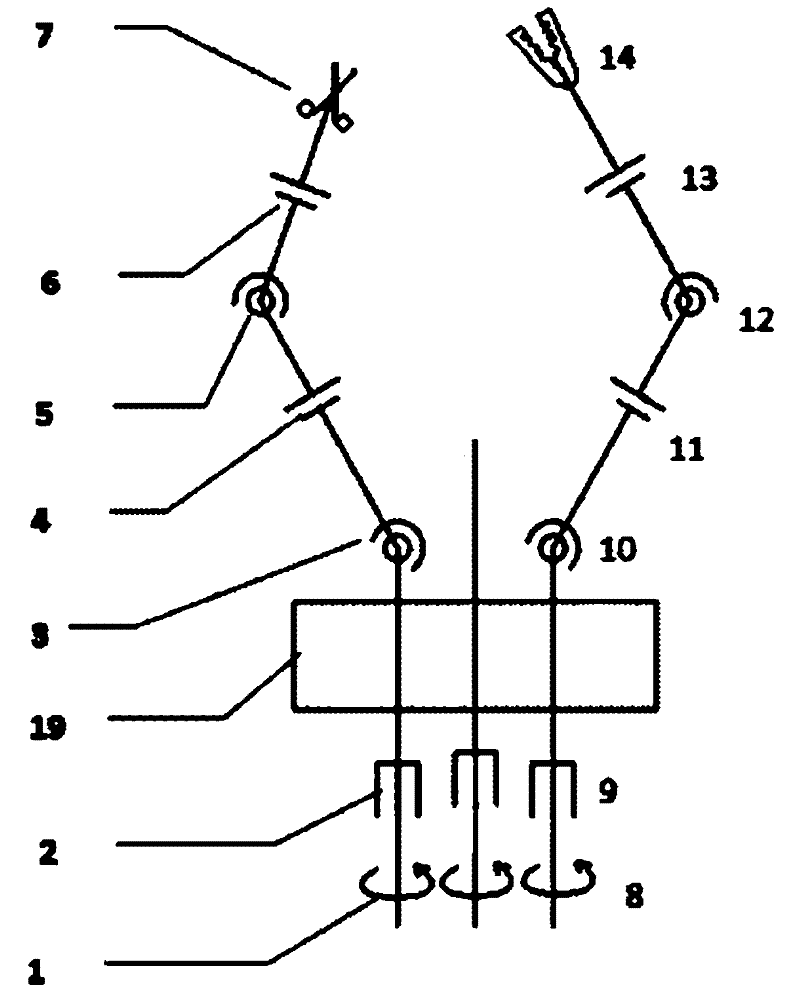
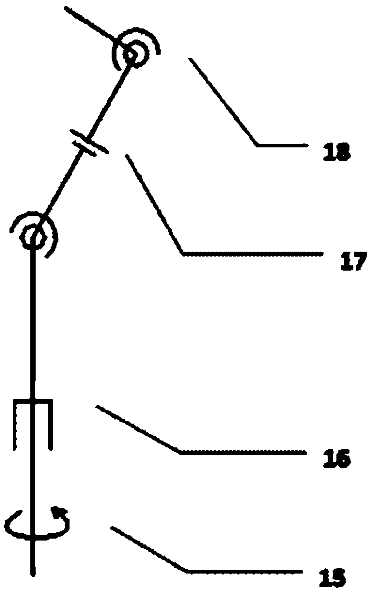
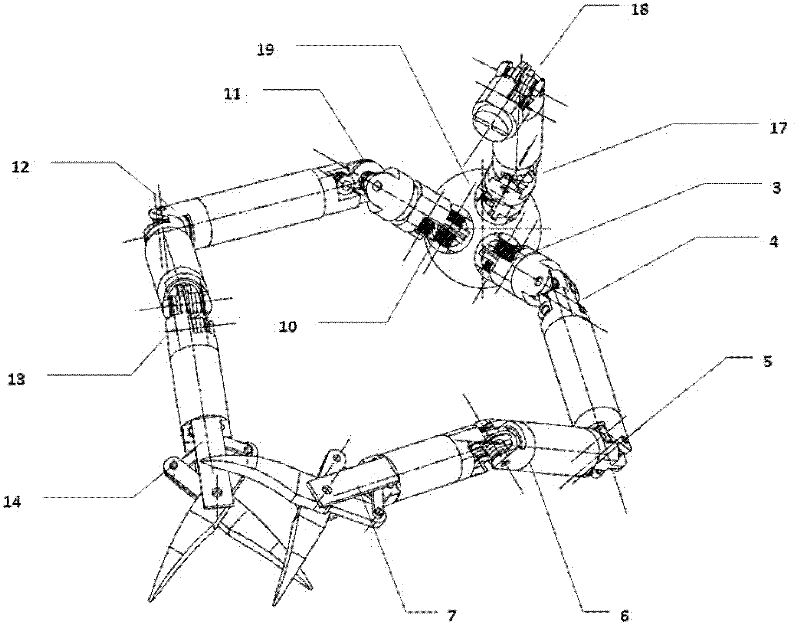
[0031] Such as figure 1 , 2 As shown, this embodiment includes: two 7-degree-of-freedom robotic arms with a scalpel installed at the ends, and a 5-degree-of-freedom robotic arm with a camera installed at one end. Each degree of freedom is pulled by a wire rope. These three arms are set on the same lifting platform. Of course, it can also be placed as needed during actual use.
[0032] Such as figure 1 As shown, the mechanical arm with 7 degrees of freedom is composed of a cylindrical plastic arm, stainless steel joints and several special tools, and also includes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More