

Method for detecting and tracking obstacles in front of vehicle
An obstacle detection and obstacle technology, applied in the field of obstacle detection and tracking in front of the vehicle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention is described in detail below in conjunction with accompanying drawing:
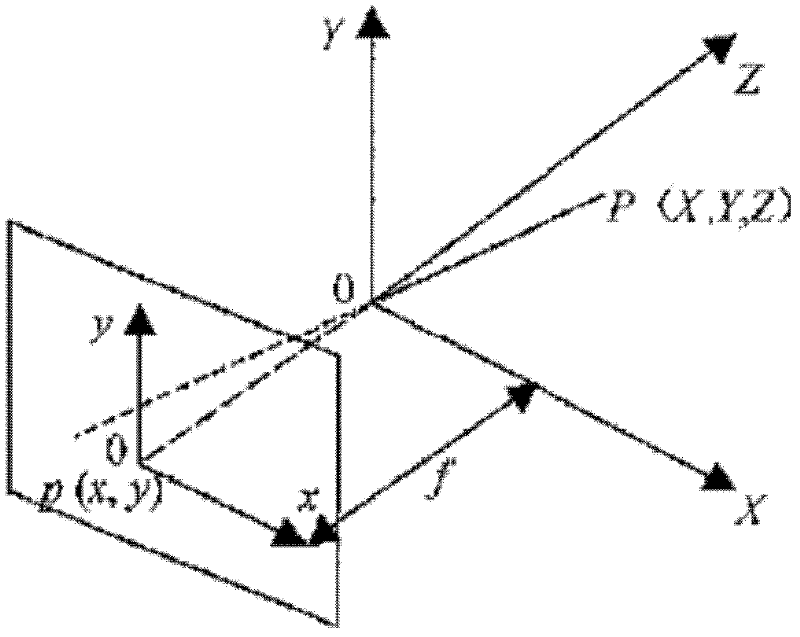
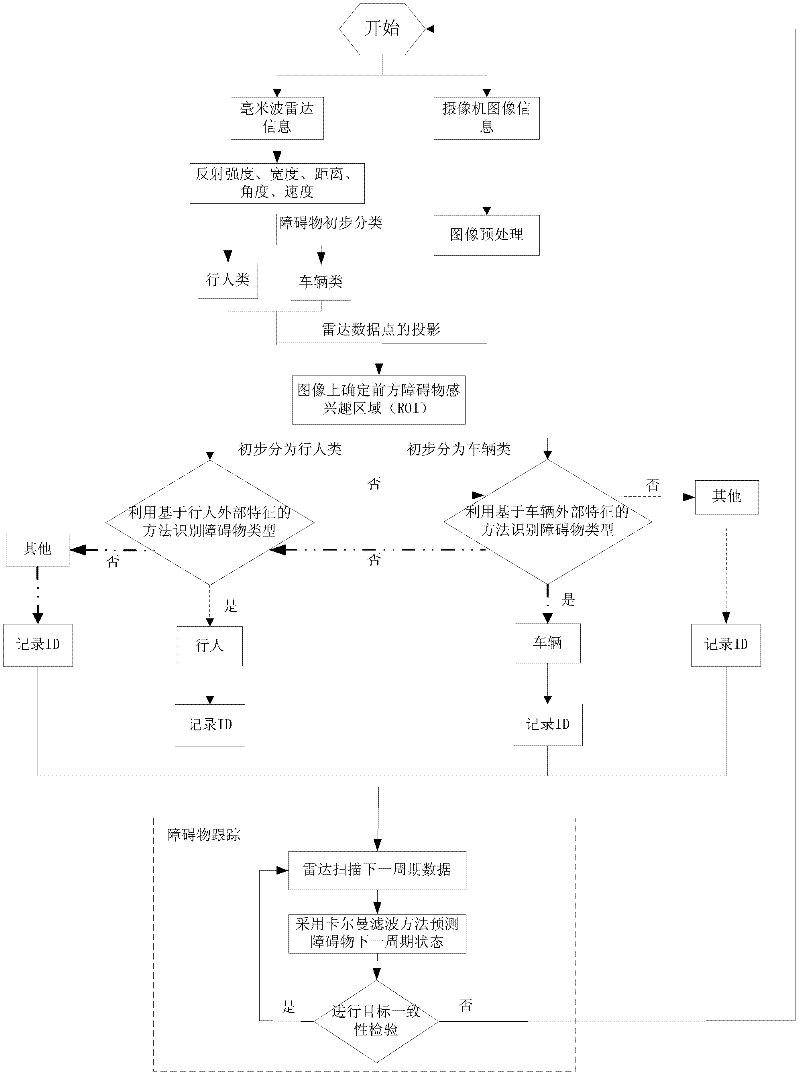
[0074] The obstacle detection and tracking method in front of the vehicle of the present invention adopts the fusion method of millimeter-wave radar and monocular vision (camera), and realizes the detection, identification and tracking of obstacles in front of the vehicle. It is characterized by:
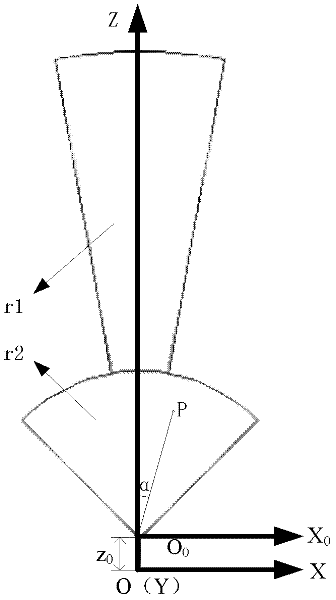
[0075] 1. The present invention uses millimeter-wave radar to obtain data information of obstacles in front, which mainly includes distance, angle, speed, reflection intensity and width information of obstacles in front, etc.
[0076] 2. According to the reflection intensity and width information of the obstacles ahead in the obtained millimeter-wave radar data information, the present invention preliminarily divides the obstacles ahead into pedestrians and vehicles.
[0077] 3. According to the fusion method of millimeter wave radar and monocular vision (camera), the present inven...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More