

Self-adaptive multifunctional landing jumping robot
A multi-functional and robotic technology, applied in the field of jumping robots, can solve the problems of low reliability of landing state and take-off angle control, unsolved landing flip problem, unadjustable take-off angle, etc., so as to improve positioning accuracy and energy utilization rate. , enhance the reliability of movement, improve the effect of jumping performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
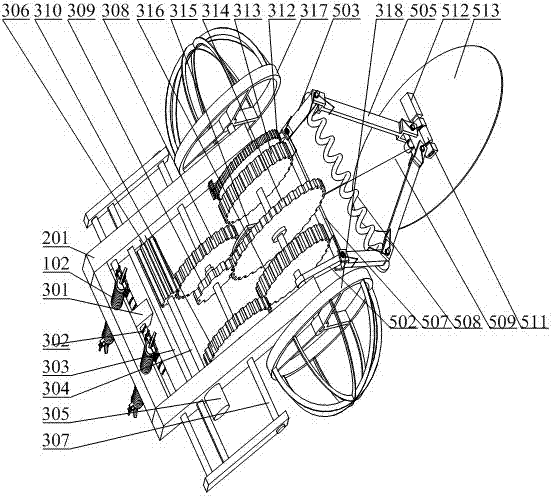
[0034] Such as figure 1 As shown, two front legs with the same structure are installed on the transverse edge of the front end of the body 201; transmission mechanisms are installed on both sides of the body 201; Take-off angle locking mechanism; the rear end of body 201 is equipped with take-off legs backward.
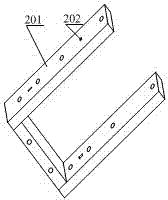
[0035] Such as figure 2 As shown, the body 201 is a U-line frame structure, holes are opened at both ends of the body 201 in the thickness direction, holes are opened at both sides of the body 201 in the width direction, and holes are opened on both sides of the body 201 from one end close to the horizontal side to the other. At one end, a circular hole, a rectangular hole, a circular hole, a circular hole, and a circular hole are sequentially symmetrically opened, and a rectangular hole is opened between the last circular hole and the penul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More