

Brake force real-time adjusting method based on brake-by-wire system and adjusting device
A real-time adjustment, brake-by-wire technology, applied in electric brake systems, brakes, electric vehicles, etc., can solve the instability of brake-by-wire system, affect the braking performance of the whole vehicle, and cannot suppress brake fluctuations and inconsistencies. stability issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
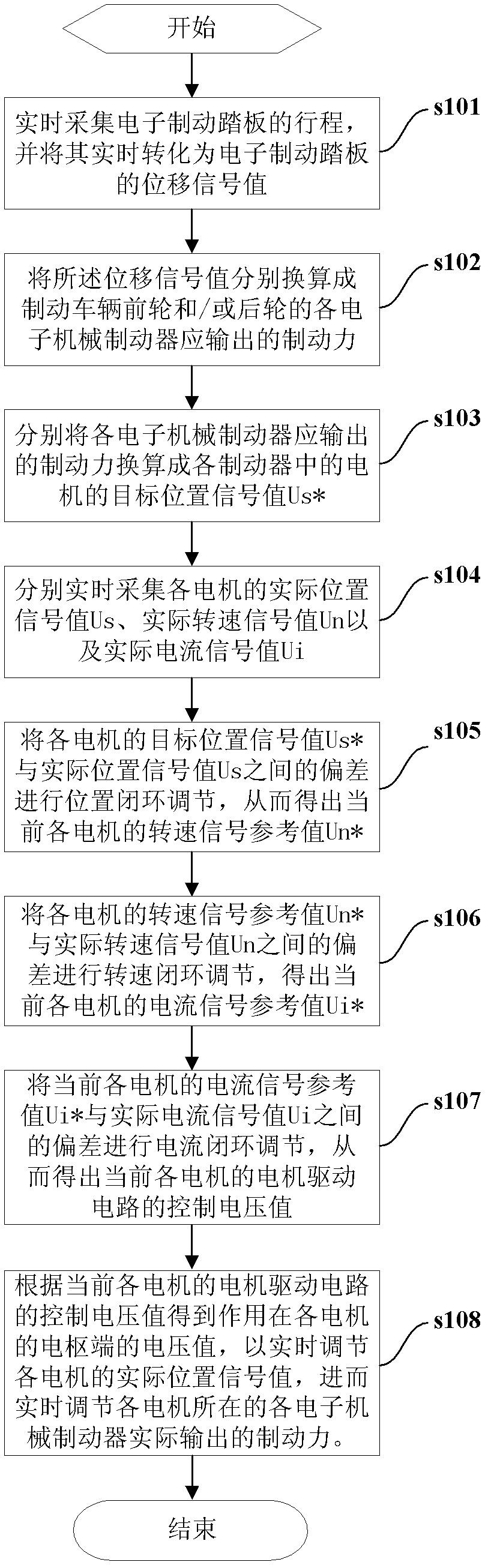
[0086] Such as figure 1 As shown, the brake force real-time adjustment method based on the brake-by-wire system described in this embodiment specifically includes the following steps:
[0087] s101. Collect the stroke of the electronic brake pedal in real time, and convert the stroke into a displacement signal value of the electronic brake pedal in real time.
[0088] Preferably, the stroke of the electronic brake pedal is collected in real time by a pedal unit sensor built in the electronic brake pedal; for each stroke position of the electronic brake pedal, the pedal unit sensor can output a corresponding The displacement voltage value is used as the displacement signal value, that is, the stroke of the electronic brake pedal collected by the pedal unit sensor in real time is converted into the displacement signal value of the electronic brake pedal in real time.
[0089] s102. Converting the displacement signal values into braking forces that should be output by the elec...
Embodiment 2
[0122] Such as Figure 4 As shown, the difference between the real-time adjustment method of braking force based on the brake-by-wire system described in this embodiment and the real-time adjustment method of braking force in Embodiment 1 is that:
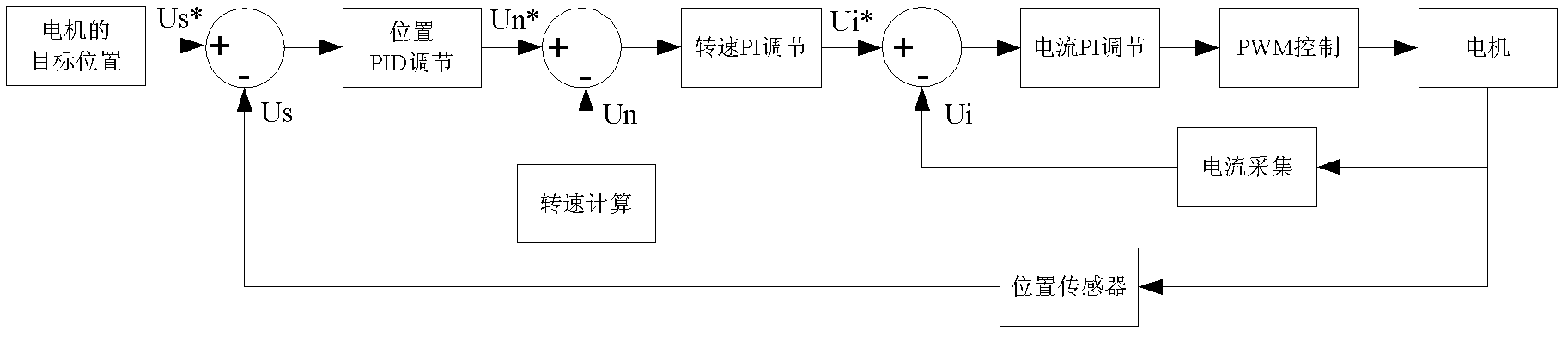
[0123] In this embodiment, an adaptive fuzzy PID controller is used to perform closed-loop position adjustment on the deviation between the target position signal value Us* of the motor in each electromechanical brake and the actual position signal value Us of the motor, that is, the self-adaptive fuzzy PID controller is adopted The deviation is adjusted by combining fuzzy control and PID control. Specifically:
[0124] According to the proportional coefficient K in the output value of the PID controller P , Differential coefficient K I and integral coefficient K D , the fuzzy relationship between the deviation e between the target position signal value of the motor and the actual position signal value of the motor and the rate...
Embodiment 3
[0135] In this embodiment, the real-time adjustment method of braking force based on the brake-by-wire system includes the following steps:
[0136] 1) Obtain the target position signal values of the motors in the electronic mechanical brakes for braking the front wheels and / or rear wheels of the vehicle respectively according to the stroke of the electronic brake pedal;
[0137] 2) respectively collecting in real time the actual position signal value of the motor in each electromechanical brake for braking the front wheel and / or rear wheel of the vehicle, the actual speed signal value of the motor, and the actual current signal value of the motor;
[0138] 3) According to the deviation between the target position signal value of the motor in each electromechanical brake of the braking vehicle front wheel and / or rear wheel and the actual position signal value of the motor collected in real time, and the real-time collected motor position The actual rotational speed signal va...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More