

Splicing method and splicing device of Lidar measurement data
A technology for measuring data and cloud data, which is applied in the direction of measuring devices, optical devices, instruments, etc., can solve the problems of heavy matching workload, difficult to deal with continuous noise data, and insufficient accuracy of one-time splicing, and achieve the effect of fast splicing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
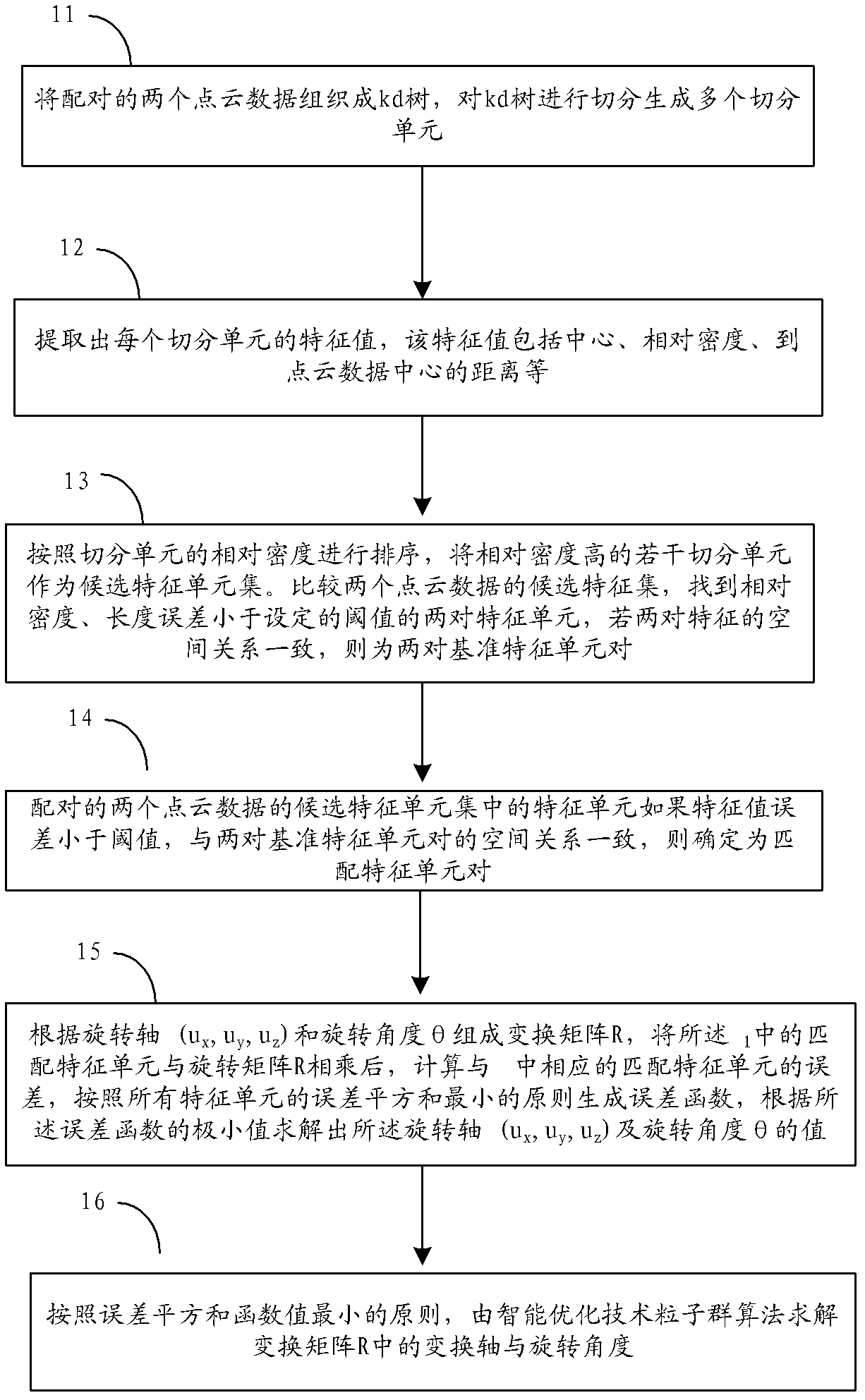
[0024] The processing flow of a splicing method of Lidar measurement data provided by this embodiment is as follows figure 1 As shown, the following processing steps are included:
[0025] Step 11. Organize the paired two point cloud data into a kd (k-dimension, k-dimensional tree) tree, and split the kd tree to generate multiple split units.
[0026] Use LiDAR to collect multiple data of the same object at different positions to obtain multiple point cloud data. The above-mentioned kd tree performs uniform segmentation in eight directions of space to generate multiple segmentation units. Each segmentation unit is a set containing several spatial points p. The data in the segmentation unit is evaluated as a whole, which improves the efficiency of point processing. The Kd tree is an effective tree-like data organization structure. The dimension of each data in the tree is k. The Kd tree divides the data on the one-dimensional with the largest variance in the three-dimensiona...
Embodiment 2
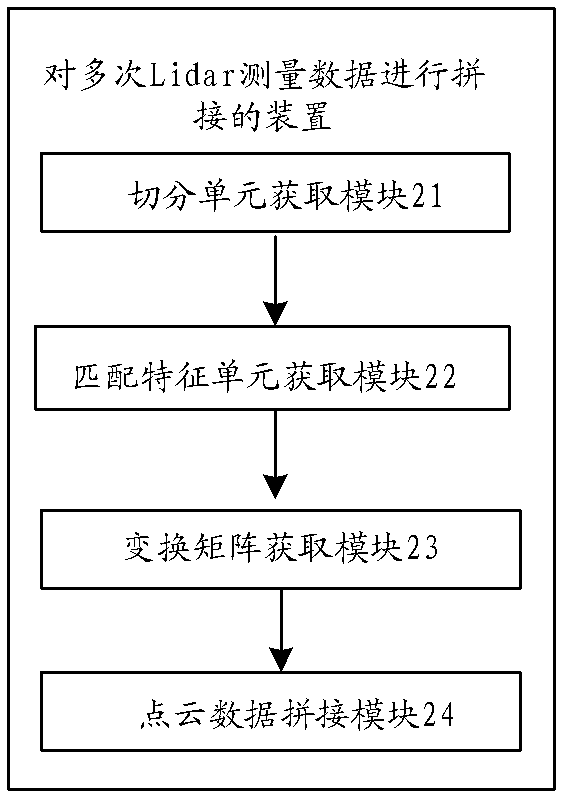
[0084] A splicing device for Lidar measurement data provided by this embodiment, its specific structure is as follows figure 2 As shown, the following modules are included:
[0085] The segmentation unit acquisition module 21 is used to use the laser detection and ranging system LiDAR to perform multiple data acquisitions on the same object at different positions to obtain multiple point cloud data, and perform pairwise pair processing on the multiple point cloud data, and the The paired first point cloud data and second point cloud data are respectively organized with a tree-like data organization structure, and the tree-like data organization structure is evenly segmented in eight directions in space to generate multiple segmentation units; the above-mentioned tree-like data organization structure The data organization structure may be a Kd tree.
[0086] The matching feature unit acquisition module 22 is used to select a set number of segmentation units according to the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More