

Method for identifying inertial parameters of six-degree-of-freedom parallel mechanism
A technology of inertial parameters and identification methods, applied in adaptive control, instruments, control/regulation systems, etc., can solve problems affecting control performance, complex filters, and difficult identification of inertial parameters, so as to avoid trajectory design and high identification accuracy , improve the effect of signal-to-noise ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
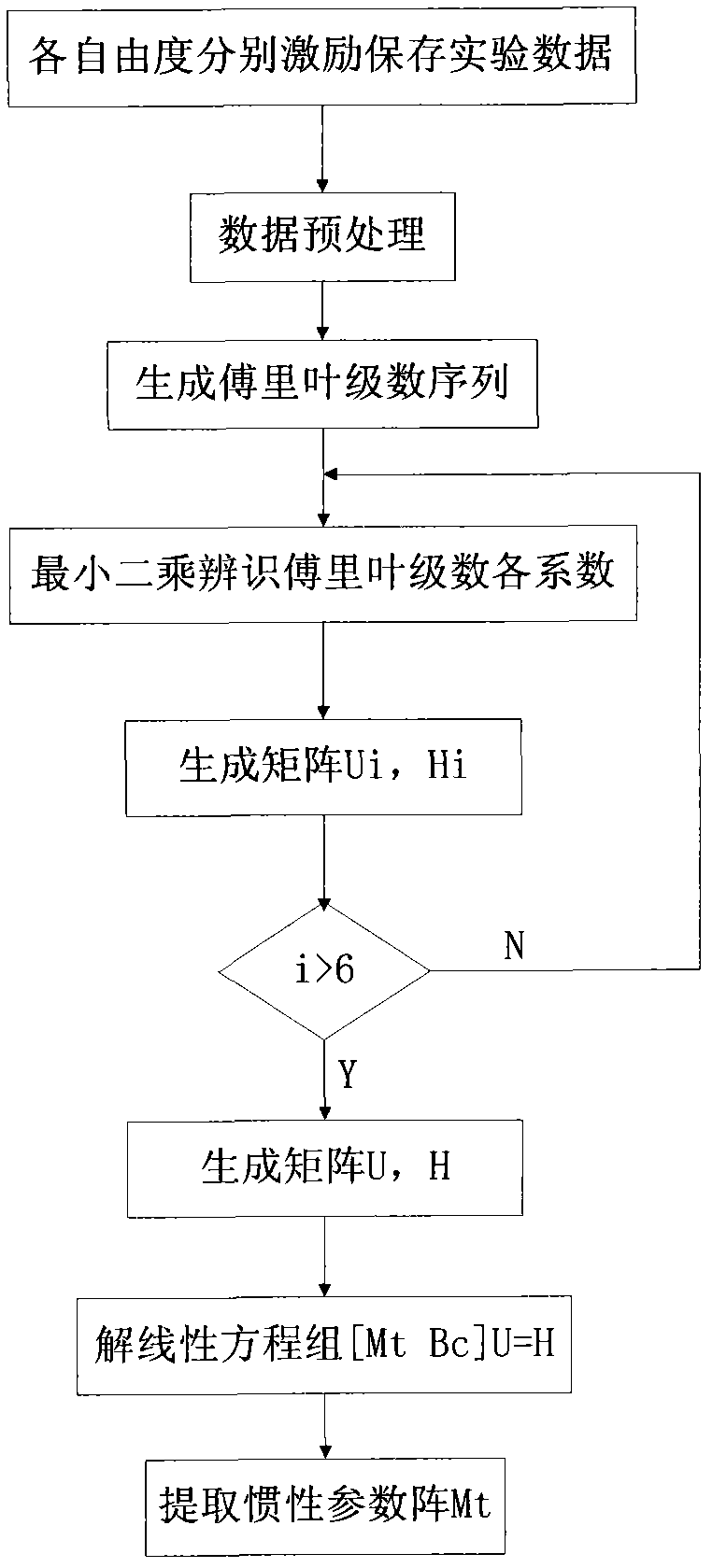
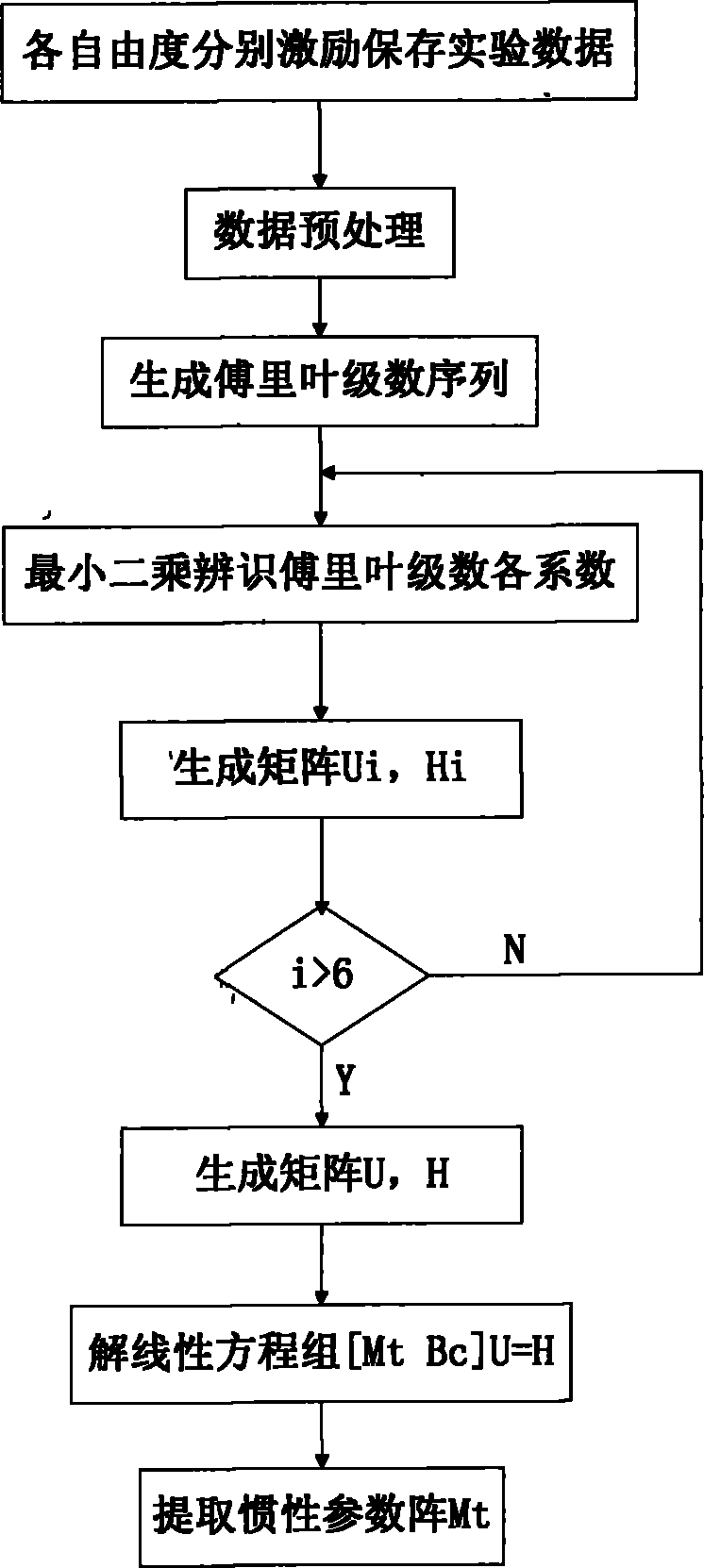
[0017] The present invention is described further below: Table 1 is the identification method mathematical principle, as follows:
[0018]
[0019] The formula ① in the table is the complete dynamics formula of the six-degree-of-freedom parallel mechanism. In the formula ①, M t is the inertial parameter matrix, is the Coriolis force term, B f is the viscous damping coefficient matrix, C f is the Coulomb friction coefficient matrix, is the gravity term, is a symbolic function, For the platform location: s ‾ x = c ‾ β T , Translation c=[x y z] T , Euler angle β=[φθψ] T . For platform speed: x ‾ . = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More