

Method for restraining flexible arm tail end vibration of robot
A flexible arm and robot technology, applied in instruments, adaptive control, general control systems, etc., can solve the problems of poor arrival time, inability to meet rapid positioning, and increase control costs, and achieve significant practical value, improve Detection quality, cost savings
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
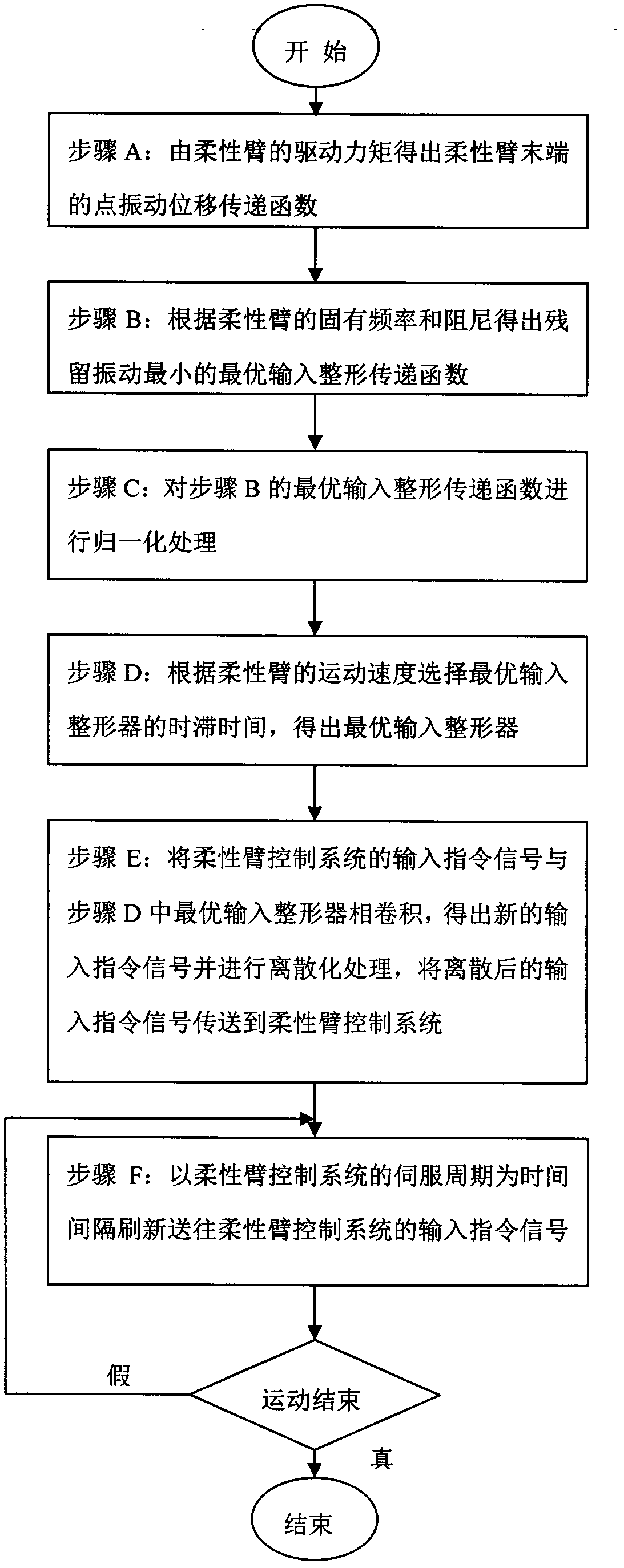
[0019] See figure 1 and figure 2 , a method for suppressing vibration at the end of a flexible arm of a robot, comprising a control system of the flexible arm of a robot, and a processing system providing a control command signal for the control system, and the processing system includes the following processing steps:
[0020] Step A: Obtain the point vibration displacement transfer function at the end of the flexible arm from the driving moment of the flexible arm;
[0021] Step B: According to the natural frequency and damping of the flexible arm, the optimal input shaping transfer function with the minimum residual vibration is obtained;
[0022] Step C: normalize the optimal input shaping transfer function of step B;
[0023] Step D: Select the delay time of the optimal input shaper according to the movement speed of the flexible arm, and obtain the optimal input shaper;
[0024] Step E: Convolute the input command signal of the flexible arm control system with the op...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More