

Vision measurement location and correction system based on dynamic routing mechanism
A visual measurement and correction system technology, applied in the field of visual positioning, can solve the problems of low precision, poor adaptability, and low GPRS positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The system of the present invention is further described below in conjunction with the accompanying drawings: this embodiment is implemented under the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
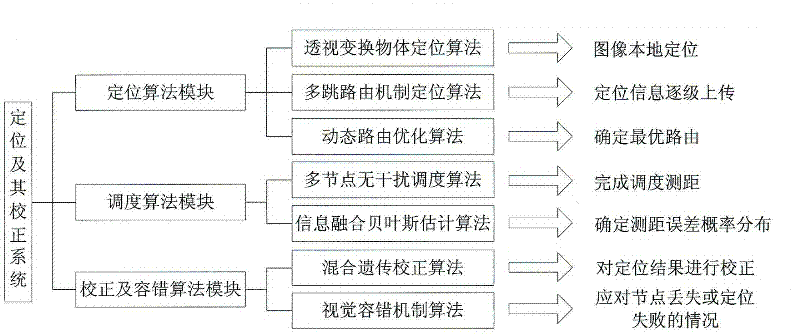
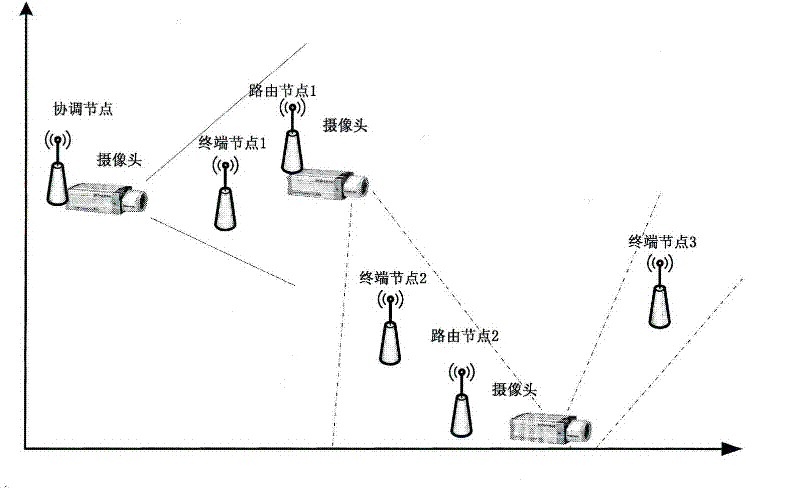
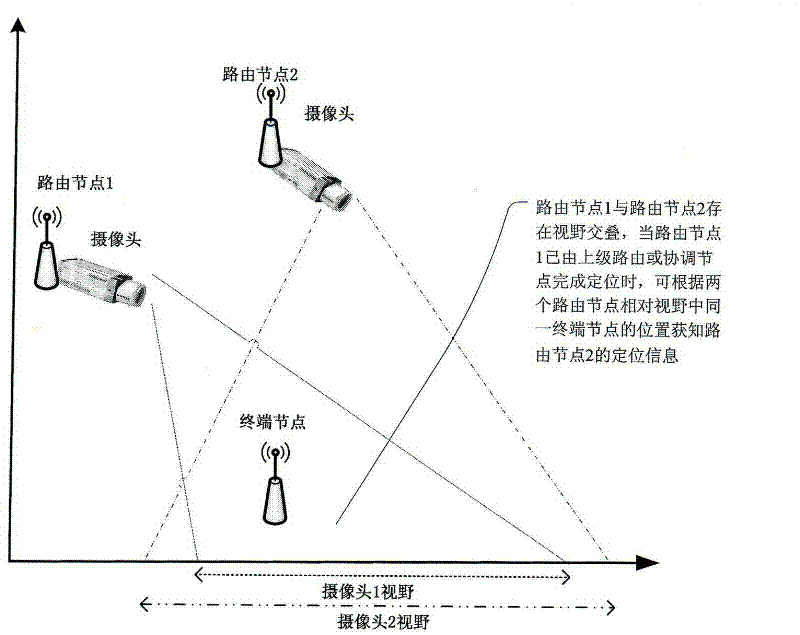
[0061] Such as Figure 5 As shown, this example is an embedded vision measurement positioning and correction system based on a dynamic routing mechanism. The hardware components include: a front-end acquisition unit and a core processing unit. The front-end acquisition unit realizes the information acquisition and information transmission functions of routing nodes and terminal nodes; the core processing unit is based on the embedded OpenCV algorithm library, and realizes the positioning and correction overall algorithm described in the present invention, including realizing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More