

Depth calculation imaging method based on flight time TOF camera
A TOF camera and depth calculation technology, applied in the field of computer vision, can solve the problem of low resolution of the camera depth map
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
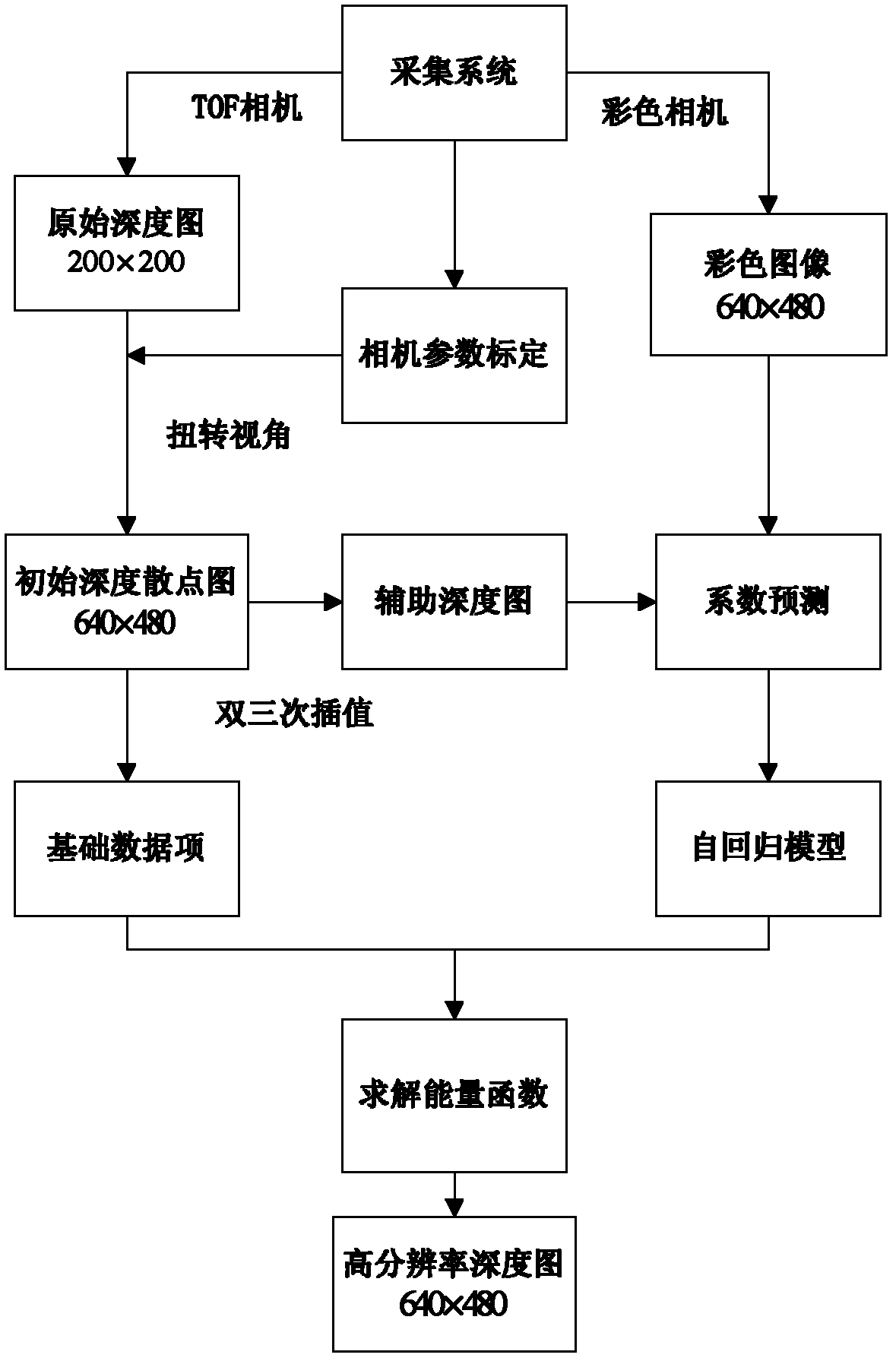
[0041] The method for optimizing the depth map of the TOF depth camera using the autoregressive model with guidance of the present invention will be described in detail below in conjunction with the embodiments and the accompanying drawings.
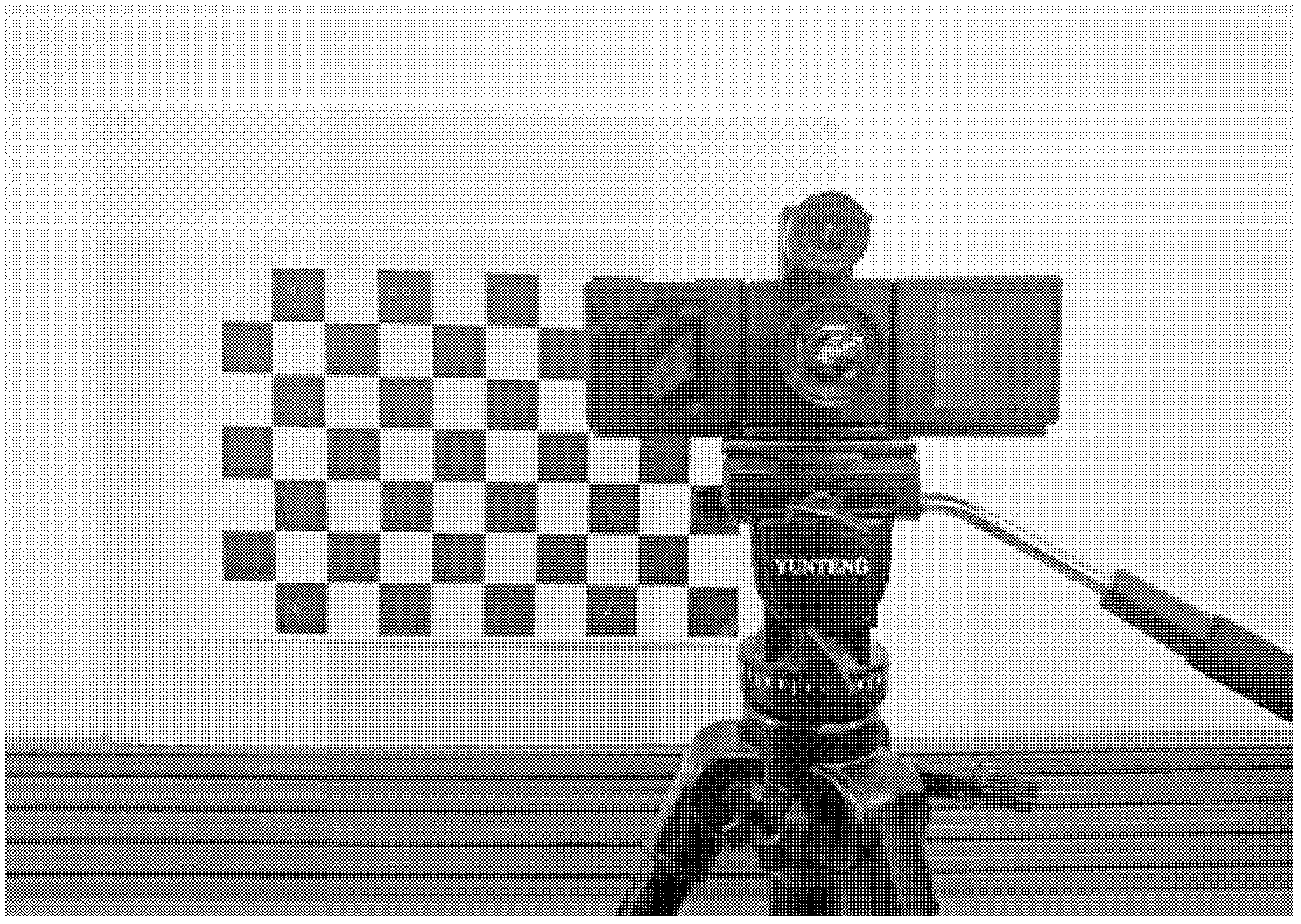
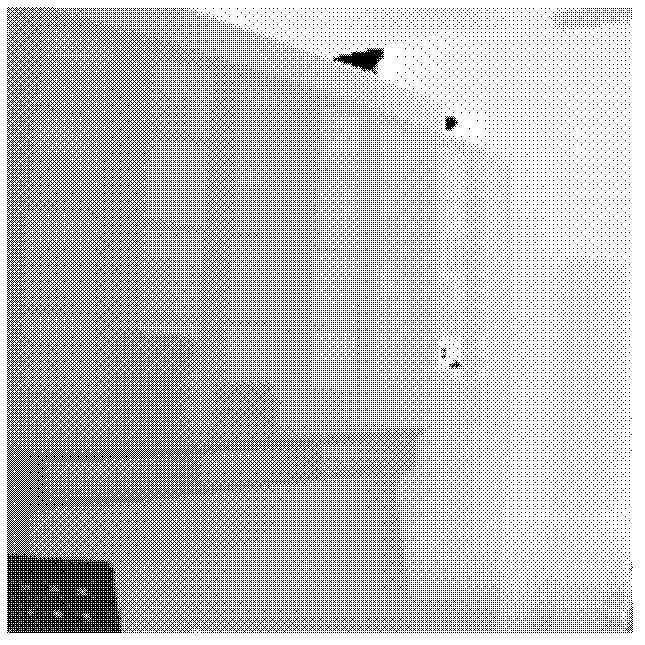
[0042] In order to solve the problem of low resolution of TOF camera depth map, a simple and practical post-processing method is provided. The device of the present invention is equipped with: a TOF PMD[vision]camcube3.0 camera, and a Point Gray Flea2 color camera; the system is formed by placing the color camera above the TOF camera. The technical scheme adopted by the present invention is to use the autoregressive model to perform super-resolution reconstruction on the depth map: the depth map super-resolution problem is specifically expressed as an autoregressive model solution equation, and through 1) using the method of bilateral filtering in the aligned color The image performs color-guided coefficient training on the autoregressive ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More