

Robot vision locating method based on round road sign imaging analysis
A technology for robotic vision and mobile robots, which is applied in the fields of instruments, photo interpretation, photogrammetry/video surveying, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
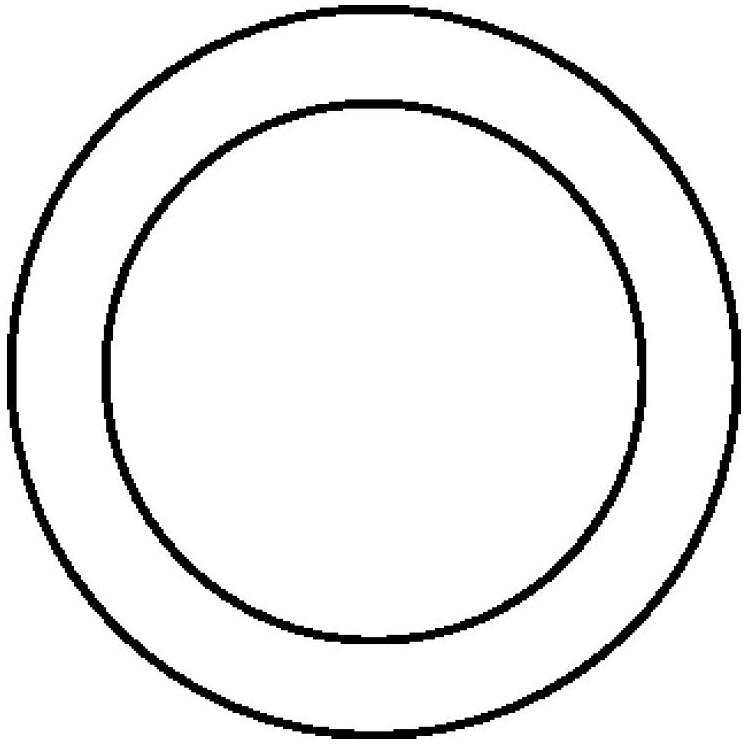
[0094] 1. Logo design
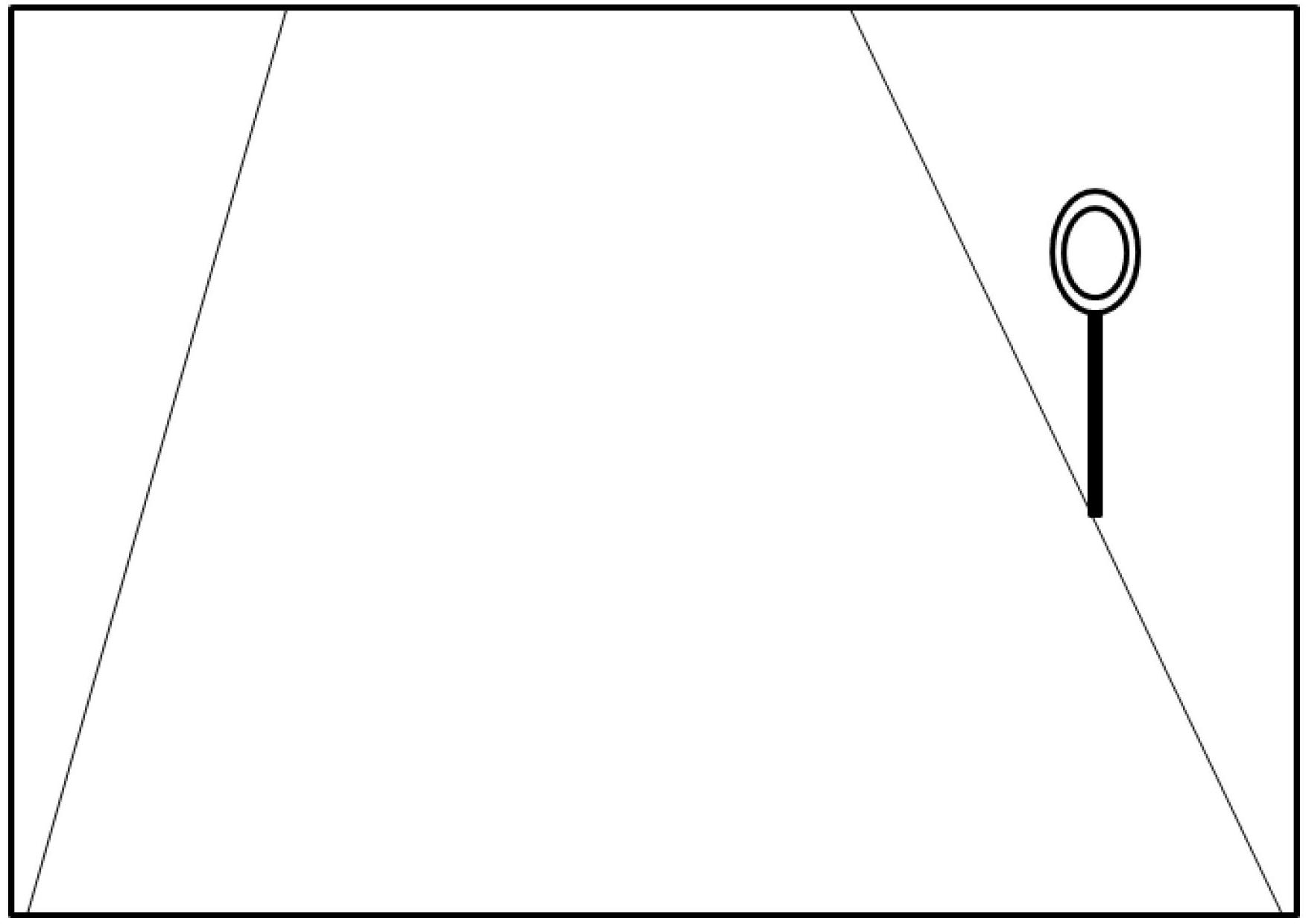
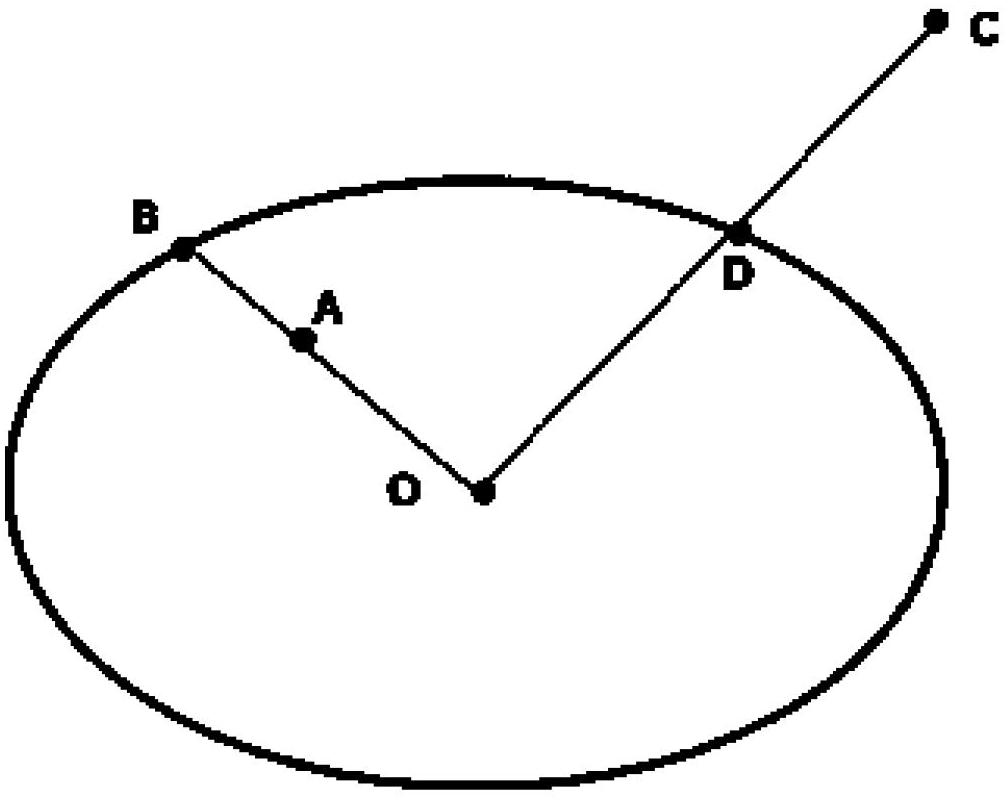
[0095] Manual identification such as figure 1 shown. The shape is round, and the logo diameter is designed to be 20 cm. Observing from different angles from the front, the logo should appear as an ellipse, which is convenient for detecting the logo from various angles. Since the logo presents an elliptical outline in the visual image, a special detection method can be used to detect it well even in the case of a certain occlusion; the edge of the logo is provided with a yellow edge with a width of 4 cm to improve the detection of the logo The accuracy rate, using the color features provided by the logo, also makes the detection easier and more reliable; the inside of the logo is black.
[0096] The logo adopts a circular outline style and two colors of yellow and black mainly to adapt to detection under outdoor conditions. First of all, the outdoor environment is complex and there are many interferences. Special styles and special colors can provid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More