

High-voltage power transmission line inspection robot mechanism
A technology for patrolling robots and high-voltage transmission lines, which is applied to manipulators, program-controlled manipulators, overhead lines/cable equipment, etc. Large center of mass adjustment range, strong climbing and moving capabilities, and the effect of reducing mass
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
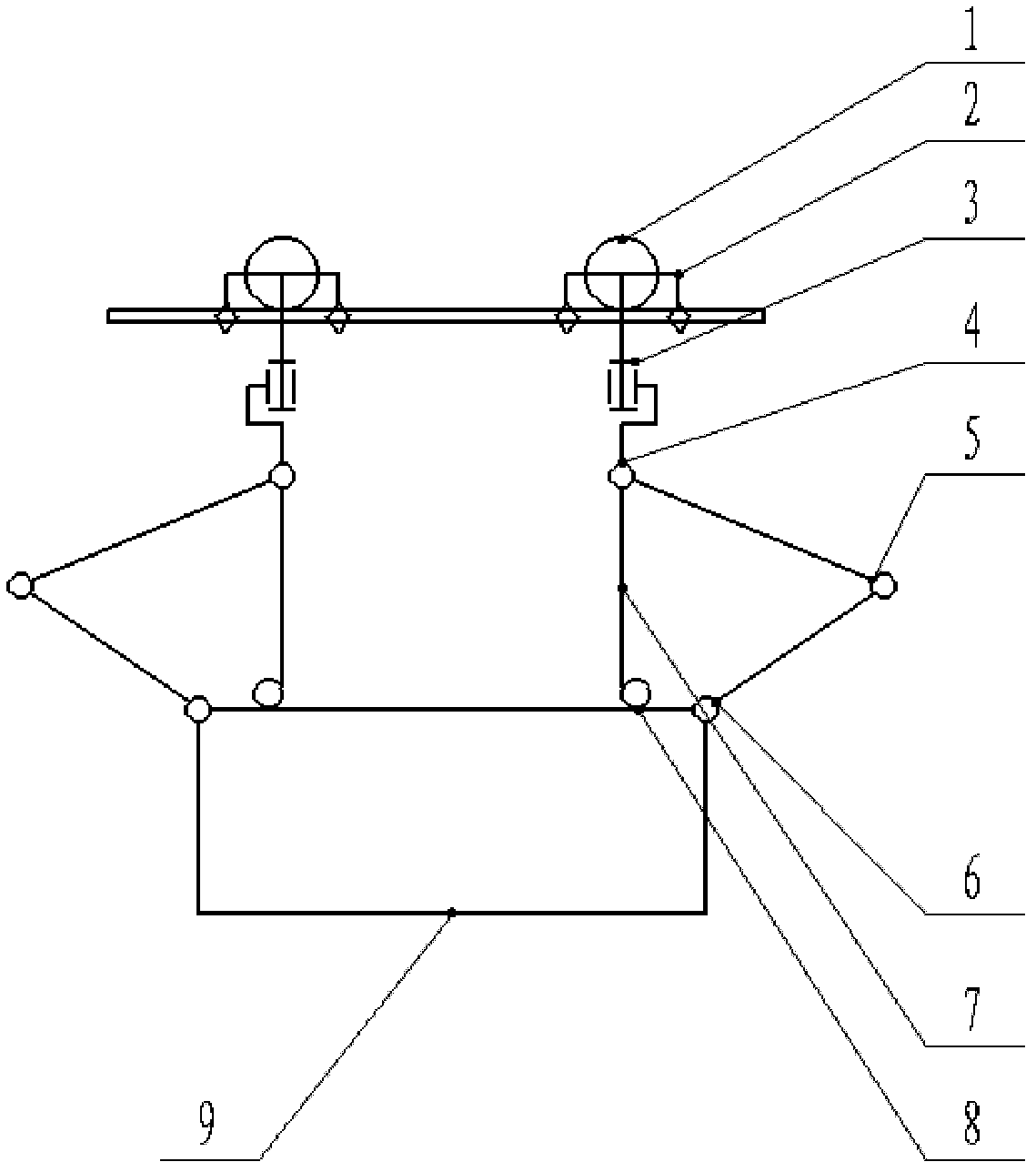
[0023] Such as figure 1 As shown, the high-voltage transmission line inspection robot mechanism of the present invention includes a front claw, a front arm, a center of mass adjustment structure, a rear arm and a rear claw, and the front claw and the rear claw are respectively connected to the ends of the front arm and the rear arm, and Gripping with the line, the claw is a combined structure of a gear pair and a worm gear. The two arms have the same structure, including a horizontal rotation pair 3 and three vertical rotation pairs 4, 5, 6. The center of mass adjustment structure includes a box 9 , roller moving platform 8 and soft cable 7, the two ends on the upper surface of the box body 9 are respectively connected to the third vertical rotation pair 6 of the front arm and the front end of the rear arm, and the two roller moving platforms 8 are symm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More