

Flexibly landed foot mechanism of humanoid robot
A humanoid robot and flexible technology, applied in the field of humanoid robots, can solve the problems of cumbersome operation and limited impact absorption effect, and achieve the effect of slowing down the compression stroke, bearing large load and small space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with accompanying drawing
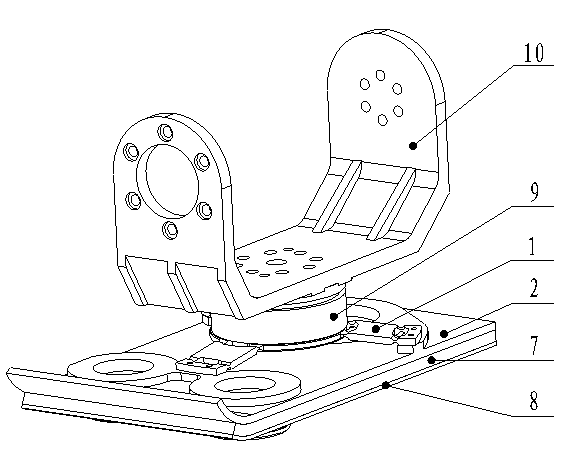
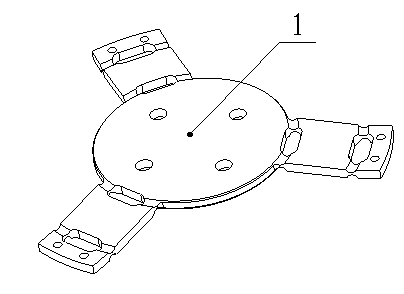
[0027] Such as figure 1 As shown, the foot mechanism of the humanoid robot for flexible landing according to the present invention includes a multidimensional flexible hinge 1, sole plate 2, middle layer rubber pad 7, bottom rubber pad 8, six-dimensional force / torque sensor 9, ankle support seat 10.
[0028] The sole plate 2 is fixedly connected with the multidimensional flexible hinge 1, the ankle support seat 9 is fixedly connected with the multidimensional flexible hinge 1 through the six-dimensional force / torque sensor 10, and the bottom rubber pad 8 is fixedly connected with the sole plate 2 through the middle layer rubber pad 7.
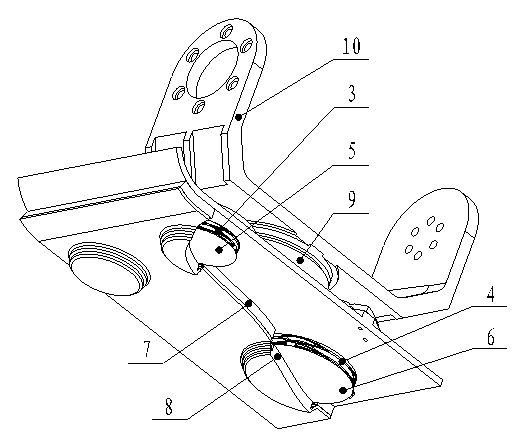
[0029] Such as figure 2 As shown, the humanoid robot foot mechanism for flexible landing also includes flat-to-top wave springs (flat-to-top wave springs 3 with an outer diameter of 35mm, flat-to-top wave springs with an outer diameter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More