

Indoor mobile robot positioning system and method based on two-dimensional code
A mobile robot and positioning system technology, applied in the field of mobile robots, can solve problems such as incorrect positioning, poor fault tolerance, lost data, etc., and achieve the effect of ensuring effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
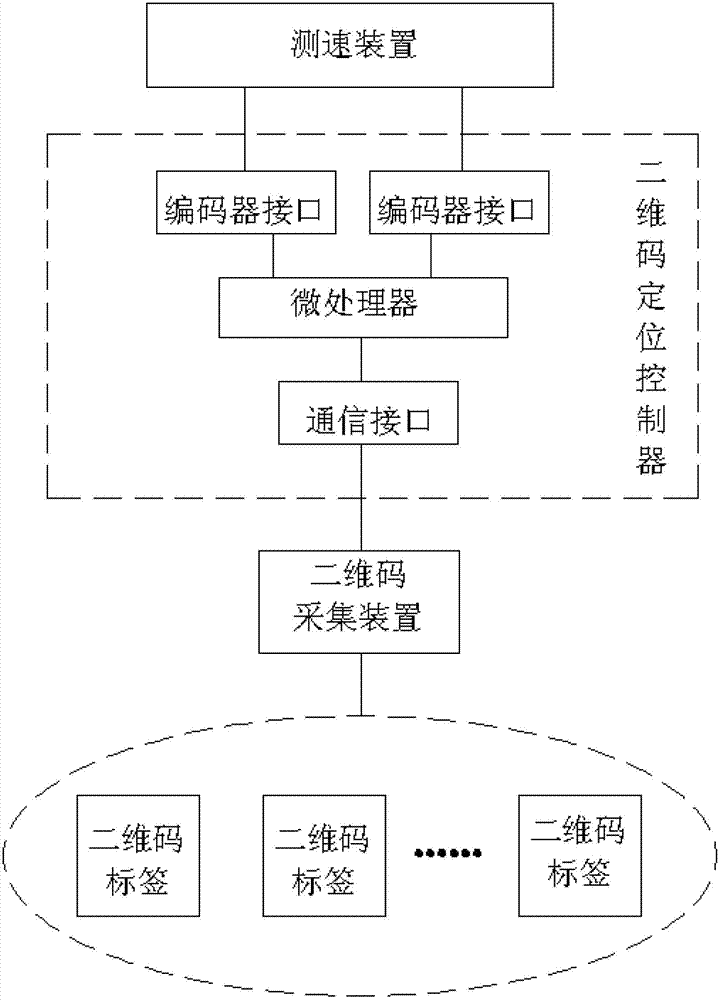
[0050] A positioning system for indoor mobile robots based on two-dimensional codes, such as figure 1 As shown, it includes a two-dimensional code positioning controller installed on a mobile robot, a two-degree-of-freedom speed measuring device, a two-dimensional code acquisition device and two-dimensional code labels distributed in an indoor environment. Arrange a certain number of two-dimensional code labels in the indoor environment to realize the guiding function for the mobile robot. In the present invention, the two-dimensional code adopts a matrix shape, and the two-dimensional code label has three corner position detection graphics and a two-dimensional code square The characteristic of the shape adopts the layout in a matrix format that can store information both horizontally and vertically, and can realize 360-degree omnidirectional read...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More