

Pneumatic-muscles-based robot hind limb simulating cheetah
A technology of pneumatic muscles and robots, applied in entertainment, toys, dolls, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
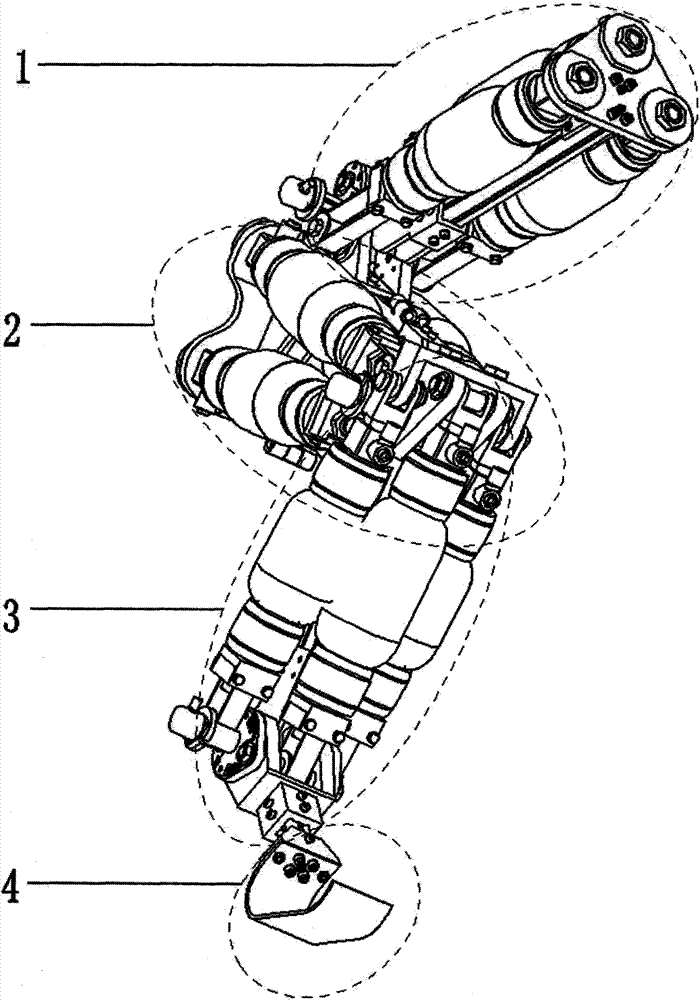
[0013] Such as figure 1 The rear limb structure of the imitation cheetah robot based on aerodynamic muscles provided by the present invention includes a hip unit 1 , a thigh unit 2 , a shin unit 3 and a foot unit 4 of the robot leg. Among them, the hip unit 1 includes the hip bone shaft, pneumatic muscles and hip joint; the thigh unit 2 includes the femur shaft, pneumatic muscles and knee joint; the shin unit 3 includes the tibial shaft, pneumatic muscles and ankle joint; the foot unit 4 Includes ankle diaphysis and foot. The hindlimb drive adopts pneumatic muscles, and the joints can be rotated by means of asymmetrical lever-type pulling. The pneumatic muscles are connected with the raised part of the bearing cover or the double-ended studs through a belt. An angle sensor is installed at one end of the joint shaft. When the joint rotates, the angle sensor obtains the rotation angle of the joint, and the angle sensor feeds back the angle value to the motion control board of e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More