

Spot calibration method of rotary strap-down inertial navigation system with unknown carrier attitude
A strapdown inertial navigation and on-site calibration technology, applied in the field of measurement, can solve the problems that multi-position tests and speed tests cannot be implemented
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
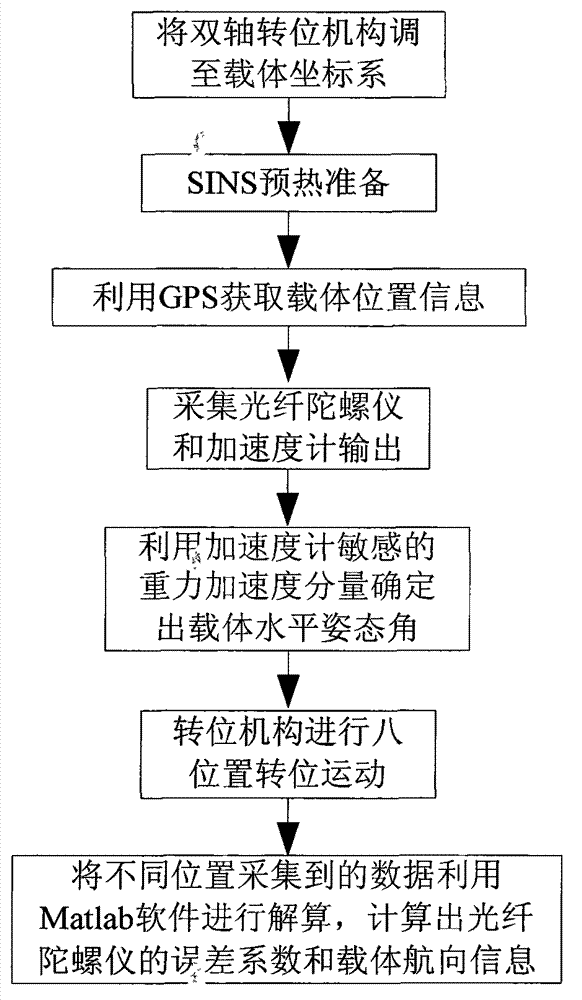
[0055] The specific embodiment of the present invention is described in detail below in conjunction with accompanying drawing:
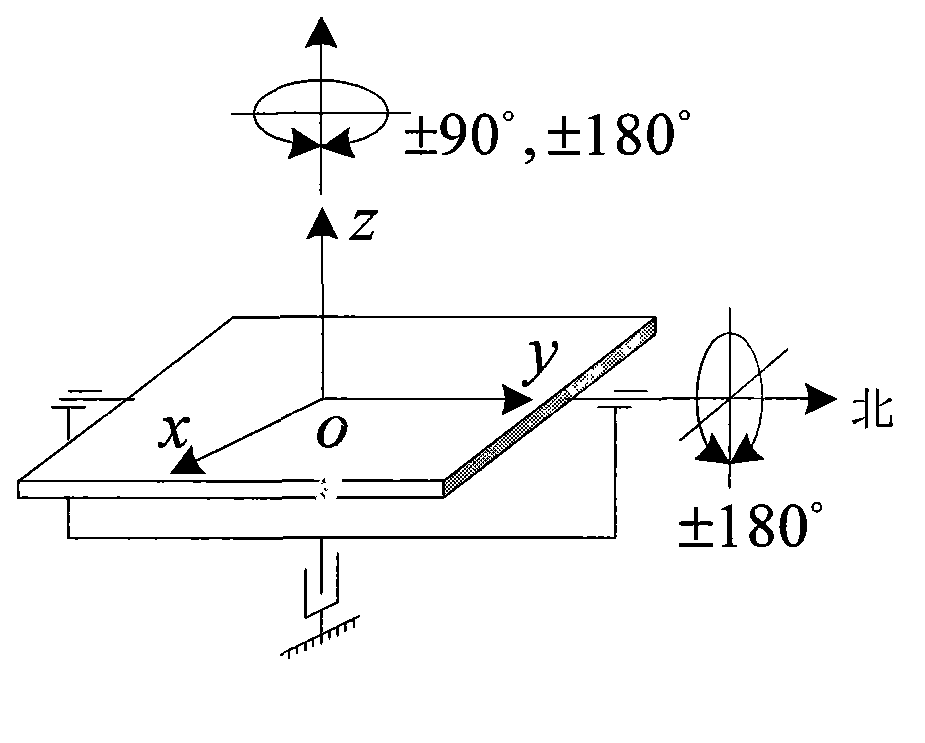
[0056] (1) Fasten the fiber optic gyroscope assembly to the table of the biaxial indexing mechanism to ensure that the coordinate system of the gyroscope coincides with the coordinate system of the indexing mechanism, and adjust the indexing mechanism to make it consistent with the carrier coordinate system before the start of the experiment;
[0057] (2) Determine the initial position parameters of the carrier by GPS, and bind them into the navigation computer;
[0058] (3) The strapdown inertial navigation system is preheated, and the data output by the fiber optic gyroscope and the quartz accelerometer are collected and processed;
[0059] (4) Utilize the gravitational acceleration component sensitive to the accelerometer to determine the horizontal attitude angle of the carrier;
[0060] Since the carrier has a fixed attitude angle relative to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More