

Method for controlling mobile robot on basis of hand signals
A mobile robot and control method technology, applied in the direction of instrumentation, data processing input/output process, electrical digital data processing, etc., can solve the problems of large size and complex operation of the control terminal, and achieve simplified composition, simple operation, and increased display area effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The gesture-based mobile robot control method of the present invention is described in detail below through specific embodiments in conjunction with the selected specific hardware carrier, as Figure 1-6 shown.
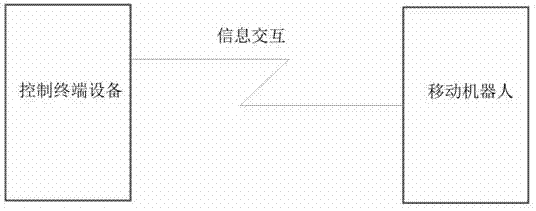
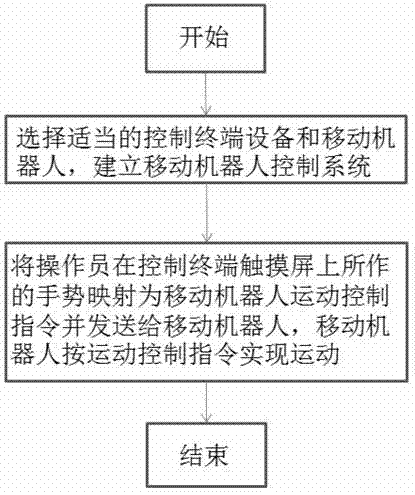
[0038] (1) Establish a mobile robot control system;
[0039] Specifically: select the predetermined control terminal equipment, the embodiment of the present invention adopts the ViewPad97i tablet computer of ViewSonic Company as the control terminal equipment, select a wireless router as the information interaction equipment, and select the UP-Voyager II two-wheel drive produced by Beijing Borch Company The robot is a controlled mobile robot, and the mobile robot is equipped with a Sony EVI-D80P camera as a controlled pan-tilt and camera. The control terminal equipment realizes the information interaction with the mobile robot through the wireless router. Under the Windows XP operating system, the mobile robot is controlled by using the tablet computer contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More