Unscented Kalman filter (UKF)-based underwater robot state and parameter joint estimation method
An underwater robot and joint estimation technology, applied in underwater operation equipment, transportation and packaging, ships, etc., can solve problems such as propeller failure, achieve simple, high estimation accuracy, and avoid linearization errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The solution of the present invention will be further described in detail below in conjunction with the drawings and embodiments:
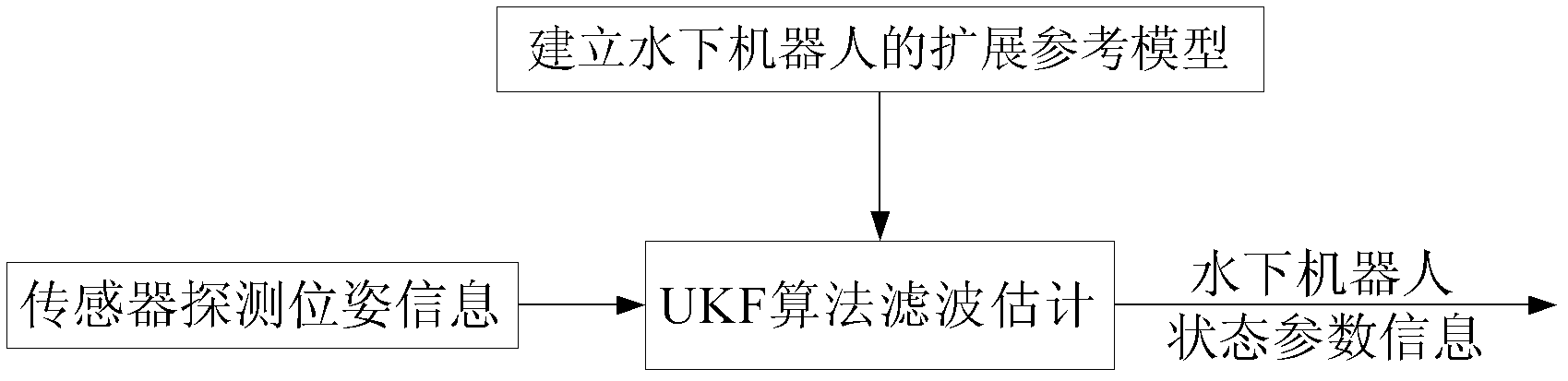
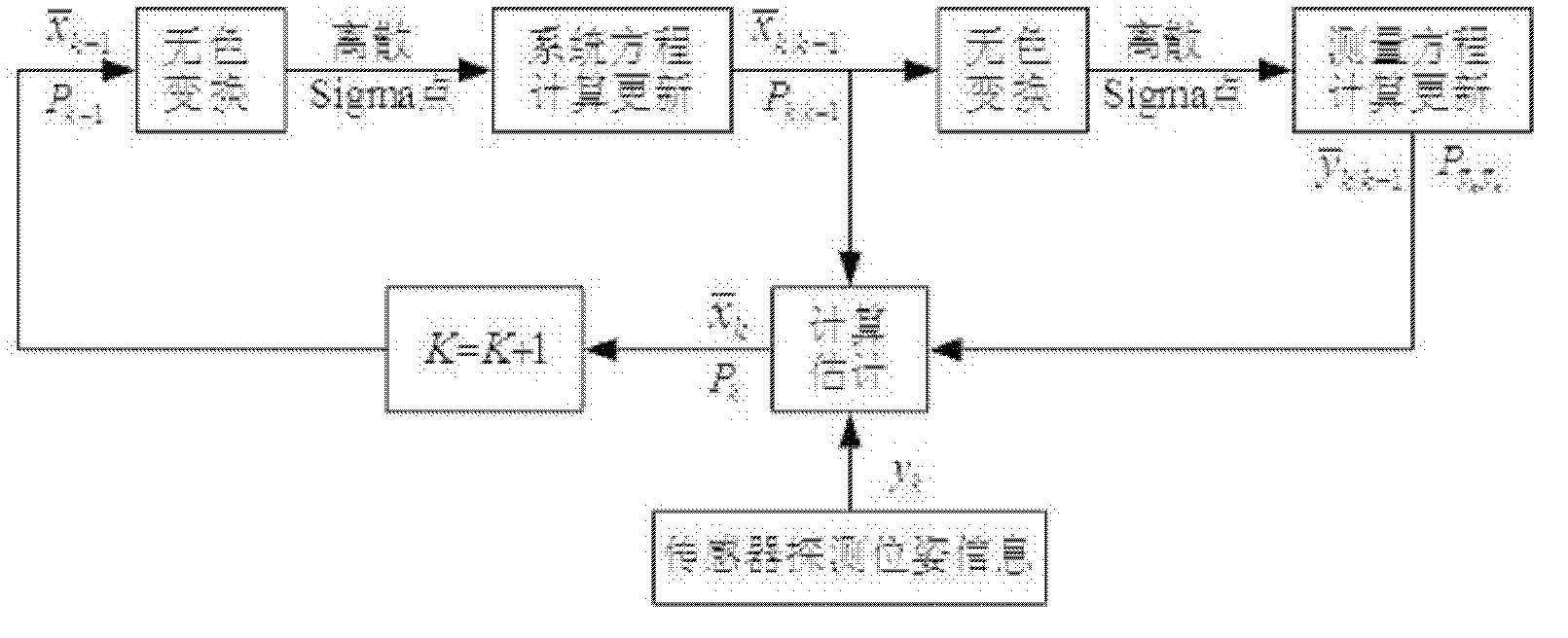
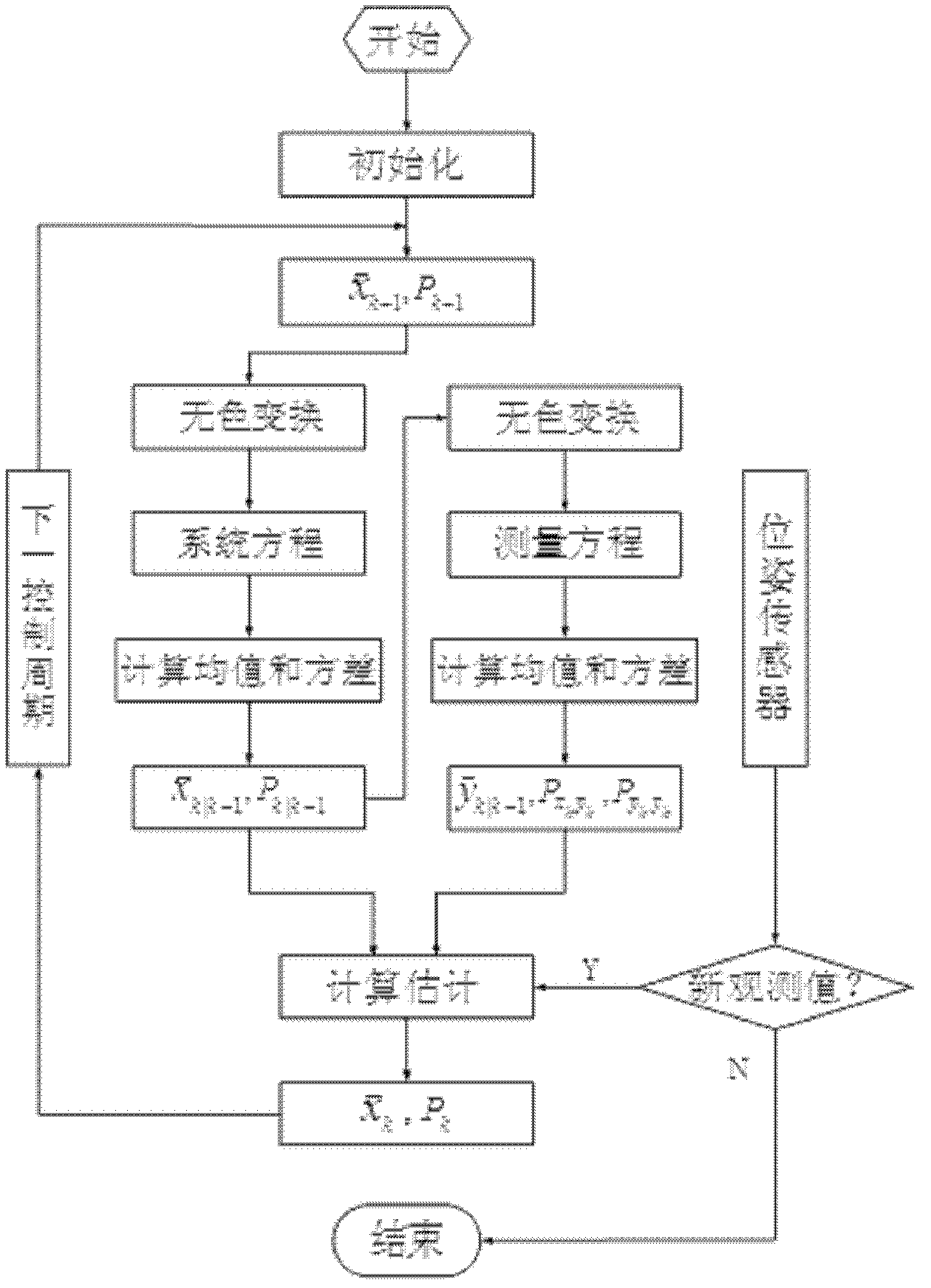
[0031] See attached figure 1 , Is a schematic diagram of the method of the present invention. The UKF-based joint estimation method of the state and parameters of the underwater robot includes the following steps: establish an offline extended reference model of the underwater robot; according to the online pose information detected by the pose sensor k , Using the UKF filter estimation algorithm, combined with the offline extended reference model of the underwater robot as the extended system state equation, transfer and update the extended state composed of the system state and thruster failure, and estimate the state and parameter information of the system in real time. Result value estimated by the system And P k ; Here the state information of the system includes filtered pose information q k And real-time estimated speed information Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More