

Virtual engineering robot system and control method
A robot system and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as ineffective effects, reduce modeling difficulty, ensure reliability and correctness, and shorten the development cycle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
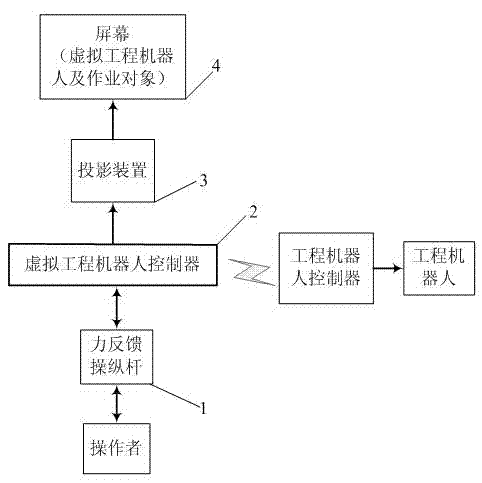
[0025] The structure diagram of the present invention is as figure 1 As shown, the virtual engineering robot system of the present invention includes a force feedback joystick 1, a virtual engineering robot controller 2, a projection device 3, and a screen 4, wherein it is used to convert the operator's manipulation motion into a virtual engineering robot and an engineering robot. The force feedback joystick 1 of the displacement setting signal is connected to the virtual engineering robot controller 2, and the force feedback joystick 1 converts the force feedback signal into an active force for the operator, and the signal output terminal of the virtual engineering robot controller 2 is connected to the projection The device 3 is connected, and the projection device 3 projects the virtual engineering robot and the work object generated by the virtual engineering robot controller 2 onto the screen 4 .
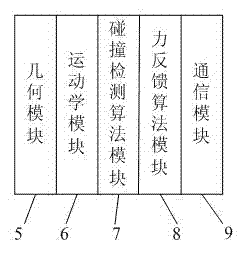
[0026] In this embodiment, the virtual engineering robot controller 2 incl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More