

Fuzzy sliding mode drive control method for wheeled mobile robot
A mobile robot, fuzzy controller technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems affecting the control accuracy of the system and the inability to eliminate system chattering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] A preferred implementation of the present invention is described in detail as follows in conjunction with accompanying drawing:
[0046] In this embodiment, a six-wheeled mobile robot is taken as an example, and a fuzzy sliding mode driving control method embodiment of a wheeled mobile robot is further described in detail in conjunction with the accompanying drawings, but this embodiment cannot be used to limit the present invention. Invented similar methods should all be included in the protection scope of the present invention.
[0047] The specific implementation steps are as follows:
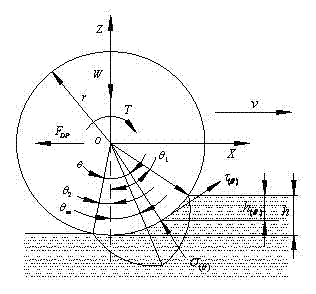
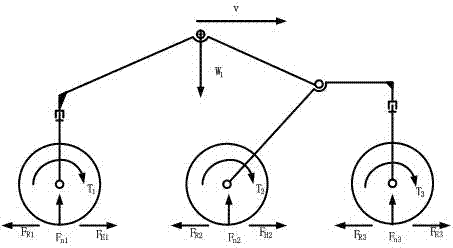
[0048] 1) Combining with the ground mechanics theory, a wheeled mobile robot driving dynamics model is established. combine figure 1 , figure 2 illustrate, figure 1 is the contact characteristic diagram between a single wheel and the ground when the wheel of the wheeled mobile robot is running. In the figure, θ m is the maximum normal stress angle, r is the wheel radius, T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More