

A method of robot head-eye coordinated motion control based on bionic mechanism
A technology of coordinated control and robotics, applied in the field of robotic bionics, can solve problems such as complex calculation algorithms of luminous flux energy functions, difficulty in application, interference, etc., and achieve the effect of enhancing naturalness, reducing difficulty, and stabilizing image information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
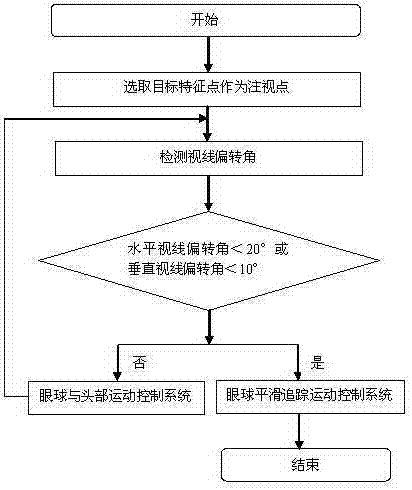
[0028] see figure 1 and figure 2 , the robot head-eye coordination control method based on the bionic mechanism, is characterized in that the rotation angles of the robot's head and eyes are controlled by their respective mathematical models, the size of the eye rotation angle is controlled by the binocular eye movement control system model, and the head and neck rotation angle is controlled by the head The model control of the internal motion control system dynamically adjusts the head-eye rotation angle according to the deflection angle; the specific steps are as follows:
[0029] 1) Select the target feature point as the fixation point: the head-eye coordination bionic vision system selects the target feature point as the fixation point, and the eyes focus on the fixation point;
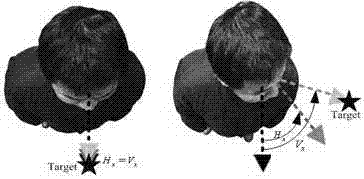
[0030] 2) Detection of sight deflection angle: When the target point is out of the center of the image plane, the head-eye coordination system detects the size of the sight deflection angle in r...
Embodiment 2
[0034] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
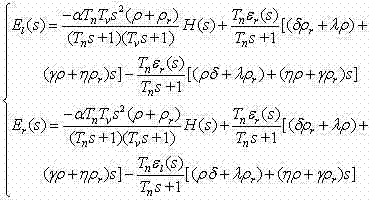
[0035] The eyeball smooth tracking movement and vestibulo-ocular movement reflex movement model described in step 3) and step 4) are:
[0036]
[0037] in, is the rotation angle of the target around the neck, is the head rotation angle, is the rotation angle of the eyeball, is the time constant of the vestibular nerve, according to physiological experiments = 16 seconds, is the time constant of the integrator, according to the physiological experiment = 25 seconds, , is the retinal sliding displacement, subscript and represent left and right respectively, according to physiological experiments , , , , , , . The head motion control model described in step 4) is:
[0038]
[0039]
[0040] in , Represents the head rotation angle and line-of-sight deflection angle when the head rotates horizontally, , Represents the head rota...
Embodiment 3
[0042] Here we take a tennis ball as an example to illustrate; the specific steps are as follows:
[0043] 1. First, the head-eye coordination bionic vision system selects the center of mass of the tennis ball as the spatial fixation point, and the eyes focus on the fixation point;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More