

Polar coordinate gear measurement center and zero calibrating method thereof
A technology for gear measurement and zero point calibration, which is applied to measurement devices, instruments, optical devices, etc., to achieve the effects of simple method, reliable accuracy and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
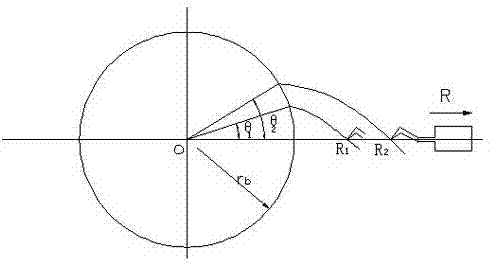
[0037] see figure 2 , using a one-dimensional needle-point probe, the force is measured perpendicular to the R direction. The specific steps are:
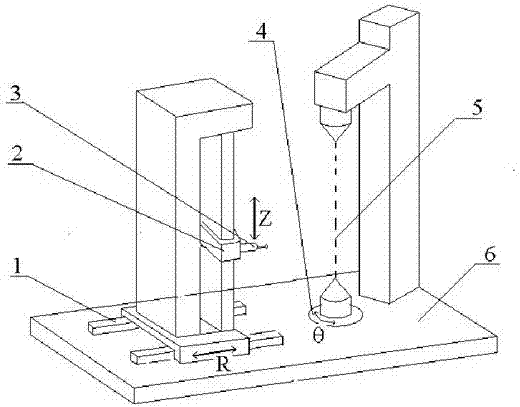
[0038] 1. After the polar coordinate gear measurement center is powered on, the indication value of each axis grating will be cleared. Place the involute sample on the rotary shaft table 4, and manually move the probe 3 to position 1 on one side of the working surface of the involute sample;
[0039] 2. The rotary axis table 4 drives the involute sample plate to rotate, so that the involute sample plate is in contact with the measuring head 3, and the coordinate values (R1, q1) of the measuring head are obtained by measuring;
[0040]3. The measuring head 3 moves to the position 2 along the R direction, and the rotary axis table 4 drives the involute model to rotate, and contacts with the measuring head 3, and the current coordinate of the measuring head 3 is (R2, q2);
[0041] 4. Repeat step 3 to obtain a series of probe 3 c...
Embodiment 2
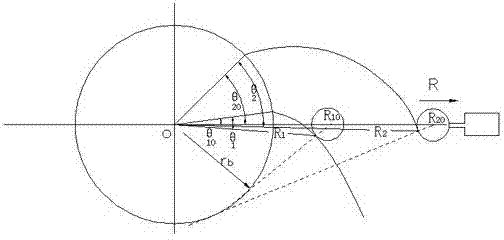
[0043] see image 3 , using a one-dimensional spherical probe, the force is perpendicular to the R direction. The specific steps are:
[0044] 1. After the polar coordinate gear measurement center is powered on, the indication value of each axis grating will be cleared. Place the involute sample on the rotary shaft table 4, and manually move the probe 3 to position 1 on one side of the working surface of the involute sample;
[0045] 2. The rotary axis table 4 drives the involute sample to rotate, so that the involute sample is in contact with the probe 3, and the coordinate value (R10, q10) of the sphere center of the probe 3 is obtained by measurement; the involute can be obtained by performing radius compensation of the probe Coordinates of points on the template ((R1, q1));
[0046] 3. The measuring head 3 moves to position 2 along the R direction, and the rotary axis table 4 drives the involute sample to rotate, and contacts with the measuring head 3, and the coordinat...
Embodiment 3
[0049] For the polar coordinate gear measurement center using a three-dimensional measuring head, the method in Embodiment 2 can be used for zero point calibration.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More