

Synchronous smooth sliding-mode control method and system of multi-degree-of-freedom redundant parallel mechanism
A control method and a technology of degrees of freedom, applied in general control systems, control/regulation systems, adaptive control, etc., to achieve good tracking performance, improved motion synchronization and coordination, and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
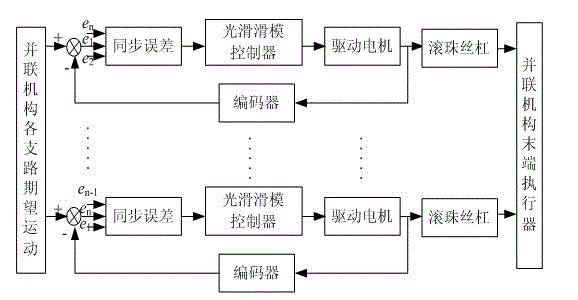
[0067] The control method of the present invention mainly focuses on improving the motion performance of the multi-degree-of-freedom redundant parallel mechanism with a new synchronous smooth sliding mode control technology, overcomes the coupling between the branches of the redundant parallel mechanism, and makes each branch of the redundant parallel mechanism Way to achieve synchronous coordinated movement. Let the multi-degree-of-freedom redundant parallel mechanism be a five-branch four-degree-of-freedom redundant parallel mechanism, which is driven by an AC servo motor. The block diagram of its branch control system is shown in figure 1 shown. The specific implementation of this control method is as follows:
[0068] 1. Establish the mathematical model of the controlled object in each control branch of the parallel mechanism with the motor drive shaft interference item
[0069] Establish the mathematical model of the controlled object of each control branch of the four-...
Embodiment 2
[0102] Such as figure 1 As shown, the synchronous smooth sliding mode control system of the multi-degree-of-freedom redundant parallel mechanism is composed of an input device, several parallel branches and the end effector of the parallel mechanism. The input device inputs the expected motion trajectory of each branch drive motor to Corresponding branches, each branch output control quantity to drive the end effector of redundant parallel mechanism, each branch is composed of synchronous error calculation module, smooth sliding mode controller, drive motor and ball screw connected in sequence, in the drive motor An incremental encoder is also provided between the output end and the input end of the synchronous error calculation module;
[0103] Incremental encoder, used to detect the actual motion state of each branch drive motor of the redundant parallel mechanism;
[0104] The synchronization error calculation module is used to calculate the deviation between the expected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More