

Control method of unmanned aircraft
A control method and UAV technology, applied in attitude control and other directions, can solve the problems of anti-interference ability and fault tolerance not being practical, and achieve the effect of good anti-interference and good versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
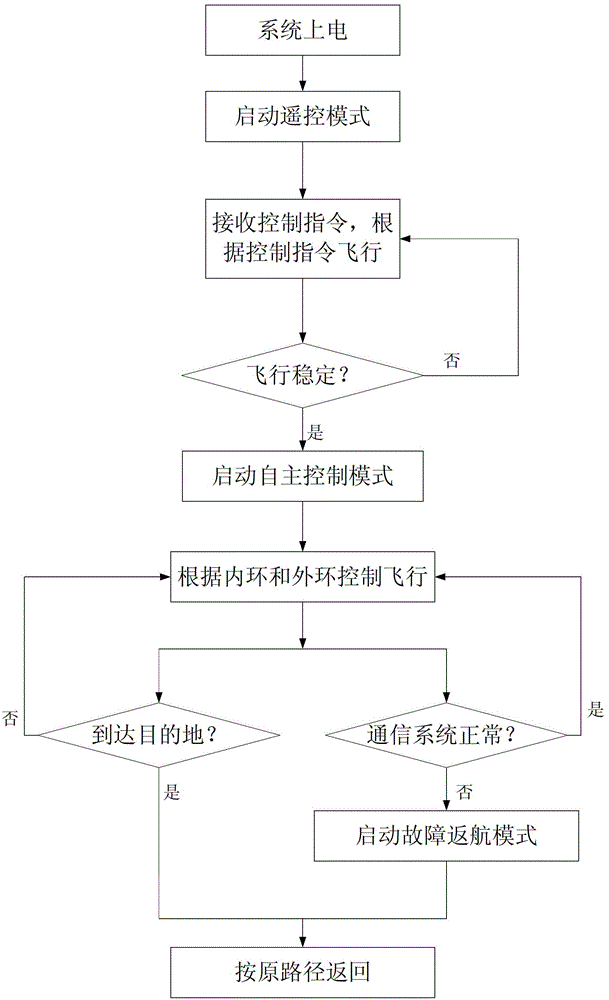
[0025] The control method of the unmanned aerial vehicle of the present invention includes three modes: remote control mode, autonomous control mode and failure return mode.
[0026] In the remote control mode, the remote controller sends control instructions to the drone, so that the drone flies according to the received control instructions.
[0027] The autonomous control mode includes inner loop control and outer loop control, the inner loop control is used to control the attitude of the UAV, and the outer loop control is used to control the position and speed information of the UAV.
[0028] The inner loop control in the autonomous control mode adopts adaptive robust control; the outer loop control in the autonomous control mode adopts fuzzy PID control.
[0029] The failure return mode is that during the flight, when the communication between the ground station and the UAV fails, the UAV returns to the starting point according to the original path.
[0030] When the dro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More