

Robot control system and method
A control method and technology for a control system, applied in the field of robot control systems, can solve cumbersome and unintuitive problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
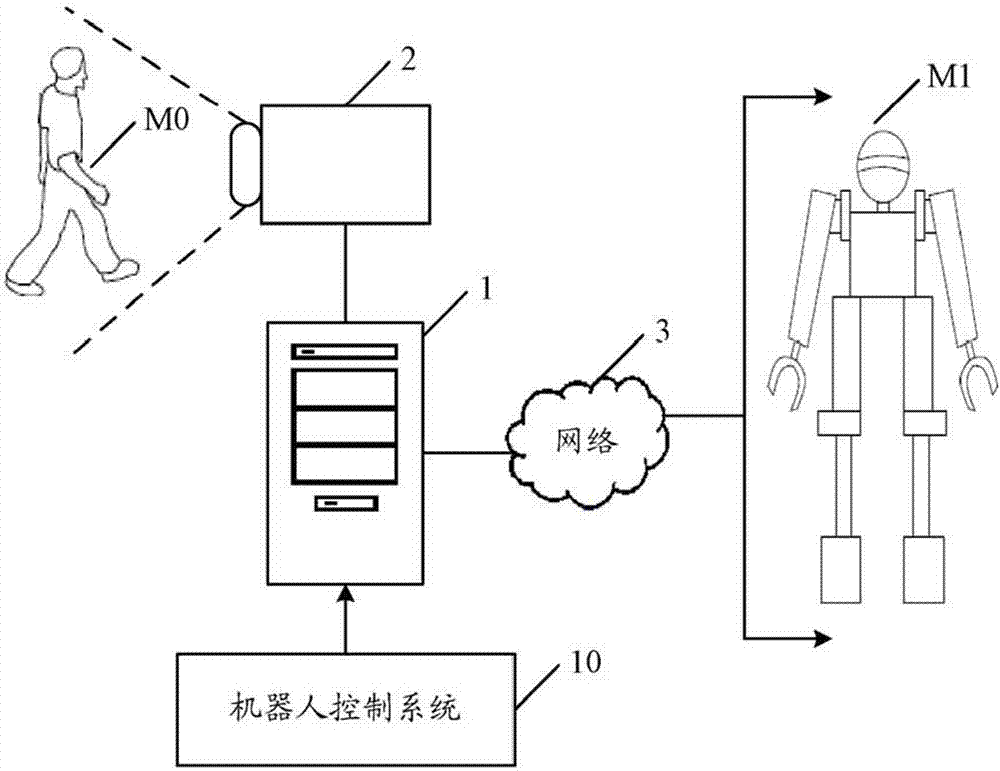
[0014] Such as figure 1 Shown is a schematic diagram of the operating environment of a preferred embodiment of the robot control system of the present invention. The robot control system 10 is installed in a master control device 1 . The main control device 1 is connected with a depth camera 2, and communicates with the robot M1 through the network 3, so as to communicate with the robot M1 in real time. The robot control system 10 acquires a 3D real-time image of the controller M0 through the depth camera 2, and analyzes the 3D real-time image to obtain movement data of the controller M0. Then, the robot control system 10 sends a control command to the robot M1 through the network 3 according to the acquired movement data, and then controls the robot M1 to perform the same actions as the controller M0. The network 3 may be a wired network or a wireless network.
[0015] It should be noted that the robot M1 can work within the sight range of the controller M0, so that the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More