

Autonomous global navigation chart (GNC) simulation test system based on optical and inertial combined measurement
A technology of inertial combination and test system, which is applied in the field of physical simulation of autonomous navigation and control of deep space spacecraft, can solve the problems of not being able to adapt to the ground simulation verification of autonomous navigation and control schemes, and the difficulty of guaranteeing the validity and authenticity of the simulation, achieving the goal of testing Strong operability, real and reliable simulation, good real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Specific embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0021] The invention provides an autonomous GNC test verification system based on combined optical and inertial measurement, which realizes the simulation of the shape and size of the navigation celestial body and the geometric relationship of the stars, the simulation of the attitude motion of the deep space spacecraft, and enhances the autonomous navigation of the deep space spacecraft. Verification of authenticity and reliability with control technology ground simulation.
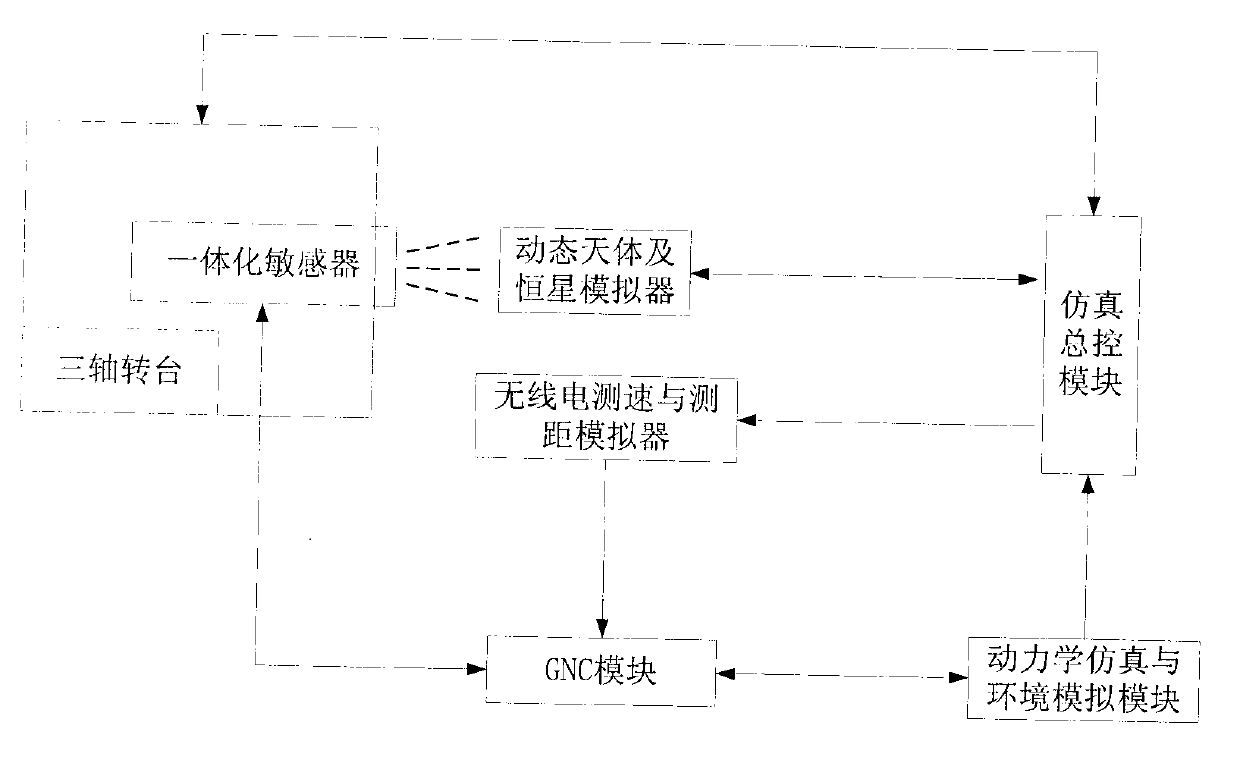
[0022] Such as figure 1 Shown is the system composition of the present invention, including integrated sensor, dynamic celestial body and star simulator, GNC module, dynamics simulation and environment simulation module, radio speed measurement and distance measurement simulator, simulation master control module and three-axis turntable;
[0023] The dynamic cel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More