

Initial alignment method suitable for rocking base
An initial alignment and pedestal technology, which is applied to navigation, measuring devices, instruments, etc. through speed/acceleration measurement, can solve the problems of large speed measurement error, large speed measurement error, and divergence of estimation results, etc., and achieve filtering convergence speed Fast, high alignment accuracy, and accurate speed reference information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following examples describe the present invention in more detail:
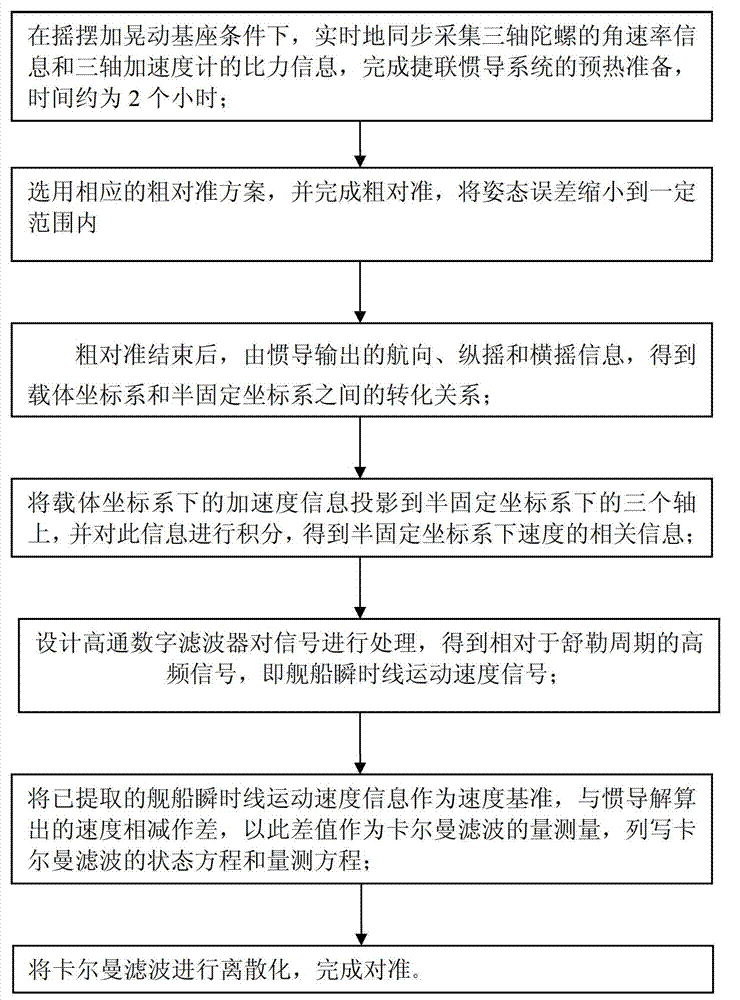
[0024] Step 1: Under the condition of swaying and shaking to interfere with the base, synchronously collect the angular rate information of the three-axis gyro and the specific force information of the three-axis accelerometer in real time, and complete the warm-up preparation of the strapdown inertial navigation system. The time is about 2 hour;
[0025] Step 2: Regarding how to eliminate the interference acceleration, select the corresponding rough alignment scheme and complete the rough alignment;
[0026] How to effectively remove the interference acceleration caused by shaking is the key to coarse alignment, because the rocking motion of the carrier will also cause the change component in the specific force information measured by the accelerometer, which reflects the normal rocking motion of the carrier. The change of heading and attitude. Therefore, the acceleration change caused by the swing cann...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More