

A cleaning robot system and its measurement and control method
A technology for robots and PTZ control, applied in the field of robots, can solve the problems of inflexible map construction and environmental impact of cleaning robots, and achieve the effects of accurate distance, improved adaptability, and improved cleaning efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Below in conjunction with accompanying drawing and specific embodiment, further illustrate the present invention, should be understood that these embodiments are only for illustrating the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various aspects of the present invention Modifications in equivalent forms all fall within the scope defined by the appended claims of this application.
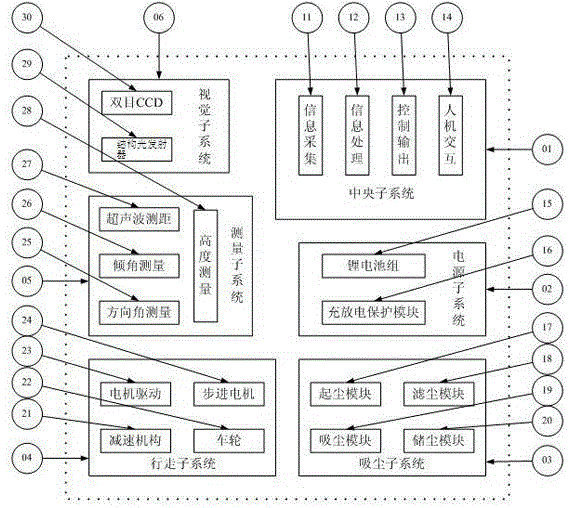
[0033] Such as figure 1As shown, the present invention proposes an indoor cleaning robot based on machine vision and multi-sensor information fusion, including a central subsystem for data processing, a visual subsystem for capturing images, a measurement subsystem for measuring distances from obstacles, and a walking subsystem. system, suction subsystem, and power subsystem that provides power supply to all subsystems of the device. The central subsystem 01 is composed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More