

Sound source localization method of three-dimensional space
A sound source localization, three-dimensional space technology, applied in the direction of positioning, measuring devices, instruments, etc., can solve the problems of insecurity, low accuracy of measuring sound source target distance, and high distance cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0101] A. The device used in this example
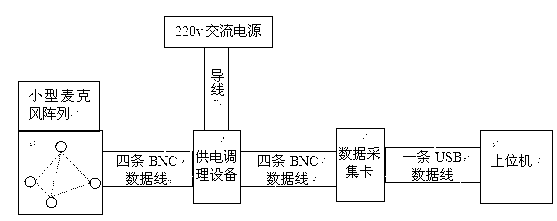
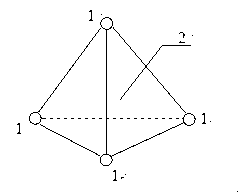
[0102] Including a small microphone array MPA201 microphone array, power supply conditioning equipment MC104, NI9215A data acquisition card and a PC with NIDAQ driver installed. The small microphone array is a regular tetrahedron with a radius of 10 cm circumscribed on the bottom surface. The microphone used is Beijing Renshengsheng The MPA201 microphone produced by Electric Technology Co., Ltd. uses the software matlab in the upper computer. The upper computer mainly includes the time delay calculation model, the azimuth angle calculation model, the elevation angle calculation model and the distance calculation model; each microphone and power supply conditioning equipment need a BNC connector The power supply conditioning equipment is connected to the entire microphone array through the 4 BNC connector data lines to power the latter. The power supply conditioning equipment is also connected to the data acquisition card through the 4 BN...
Embodiment 2
[0155] A. Equipment used in the method
[0156] The same as in Example 1.
[0157] B. In this implementation, the steps of using the above-mentioned device to locate a sound source in a three-dimensional space are:
[0158] Here the same as in Example 1.
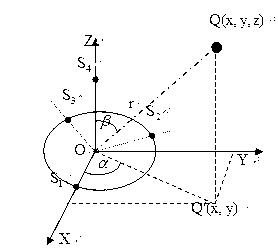
[0159] The first step is to determine the azimuth angle A of the sound source target before the small microphone array moves and the elevation angle E before the small microphone array moves
[0160] Here the same as in Example 1.
[0161] (1) Except that a small microphone array is used to collect the target sound signal for a period of 20ms, the others are the same as in Embodiment 1.
[0162] The result of the obtained relative delay estimation is: the time difference between microphone S2 and microphone S1 is 36, the time difference between microphone S3 and microphone S1 is 49, and the time difference between microphone S4 and microphone S1 is 28.
[0163] Since the acquisition card is 100k, the actual time represented by 36 here is...
Embodiment 3
[0193] B. In this implementation, the steps of using the above-mentioned device to locate a sound source in a three-dimensional space are:
[0194] Here the same as in Example 1.
[0195] The first step is to determine the azimuth angle A of the sound source target before the small microphone array moves and the elevation angle E before the small microphone array moves
[0196] Here the same as in Example 1.
[0197] (1) Except that the small microphone array is used to collect the target sound signal for a period of 30ms, the others are the same as in Embodiment 1.
[0198] The result of the obtained relative time delay estimation is that the time difference between microphone S2 and microphone S1 is 39, the time difference between microphone S3 and microphone S1 is 47, and the time difference between microphone S4 and microphone S1 is 28.
[0199] Since the acquisition card is 100k, the actual time represented by 39 here is 39 sampling periods, which is 39*10 -5 Seconds; 47 here repres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More