

Master-slave hydraulic pressure feedback manipulator control system and method for live repair robot
A robot master and control system technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of robot work content and work efficiency limitations, the operator cannot perceive the work environment, and master-slave control cannot be realized. Work efficiency, complete functions, and the effect of improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The invention will be further described below in conjunction with the accompanying drawings and embodiments.
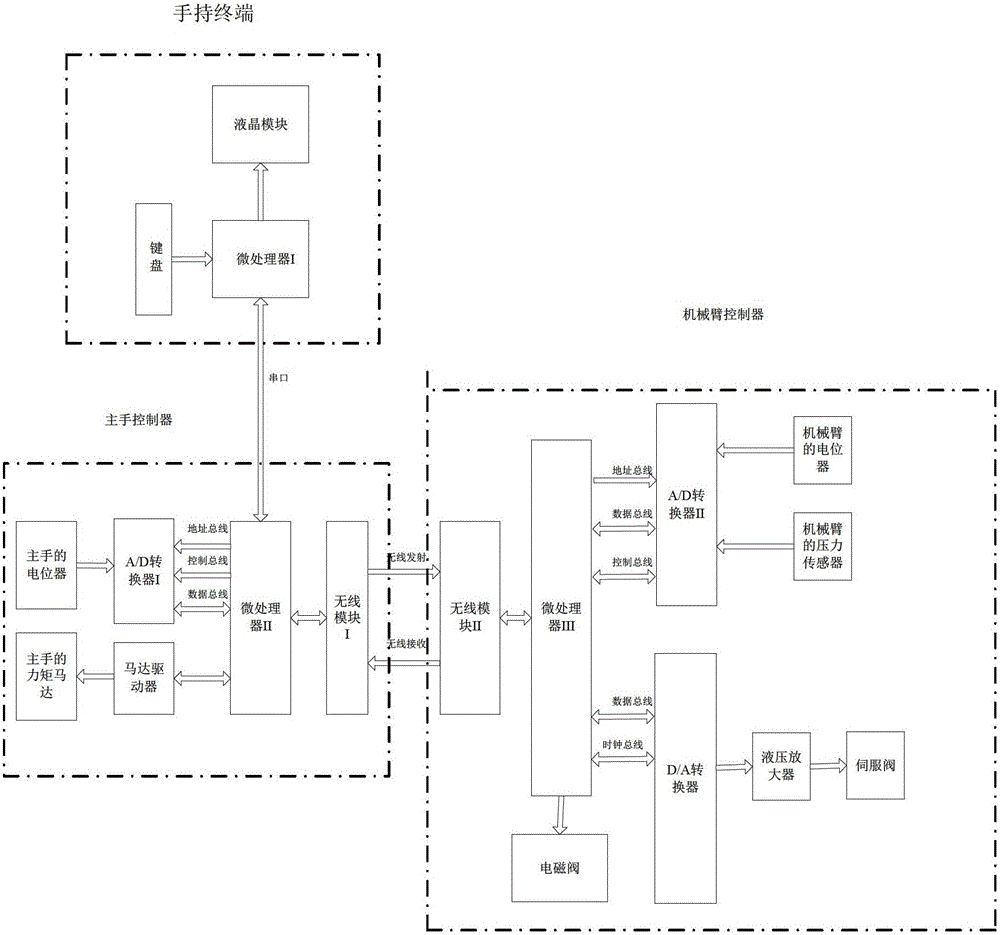
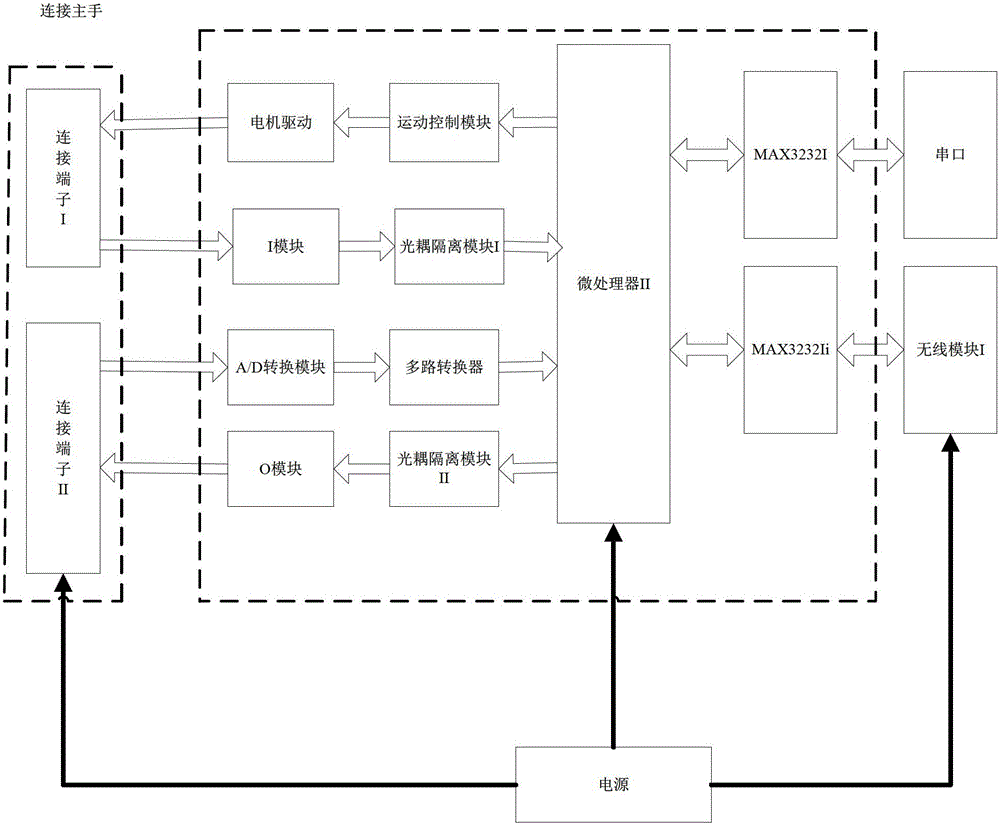
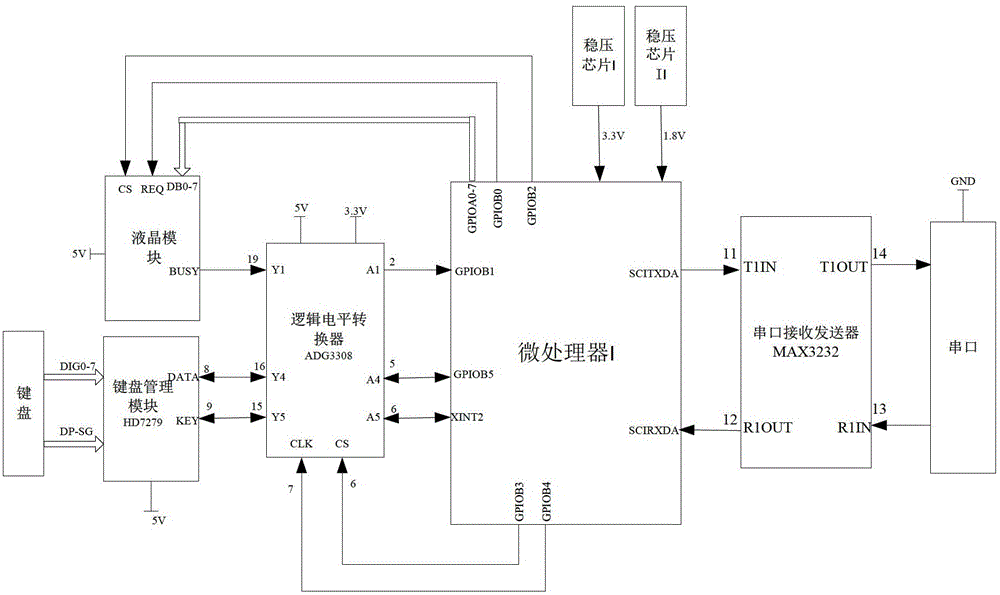
[0044] figure 1Among them, a master-slave force feedback hydraulic mechanical arm controller of a charged emergency repair robot includes a handheld terminal, an embedded master hand controller and a mechanical arm controller, and is characterized in that the handheld terminal includes a microprocessor 1, which respectively Connect with man-machine interface unit and embedded main hand controller; Described embedded main hand controller comprises microprocessor II, and it is connected with microprocessor I, wireless module I respectively; Simultaneously, microprocessor II passes data bus , address bus, control bus and the data bus, address bus, control bus communication of A / D converter 1, through the data bus and power bus communication between A / D converter 1 and some potentiometers of the main hand; torque motor driver It is connected with several torque mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More