

Simulation method for spatial rope tied robot system and based on mixed unit method
A robotic system and space tethering technology, applied in instruments, special data processing applications, electrical digital data processing, etc., can solve problems such as error sensitivity, slow solution speed, and unreliable calculation results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
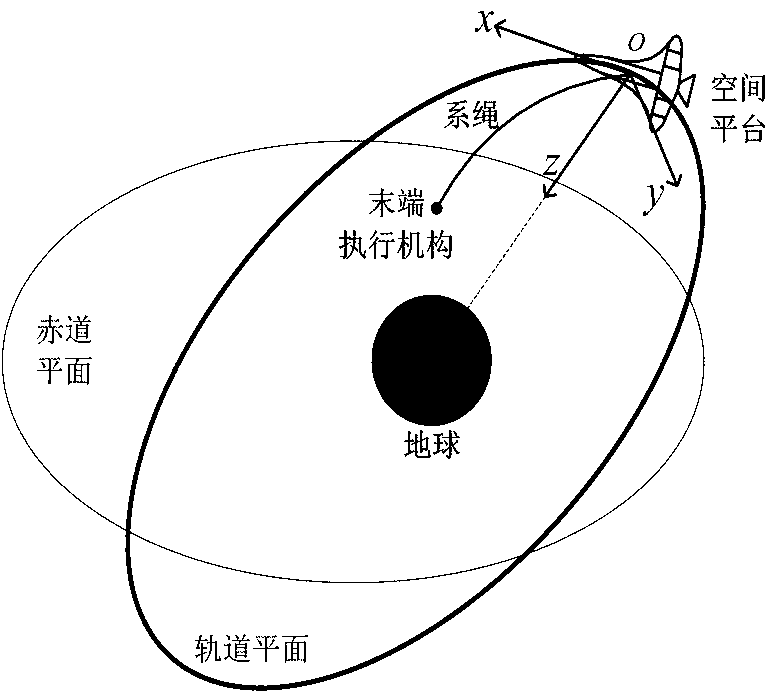
[0114] For such as figure 1 The space tethered robot system shown is composed of a space platform, a tether and an end effector. In the platform orbit coordinate system, the motion of the flexible tether in the space tethered robot satisfies:
[0115] ρ ( z . . - 2 ω z . ) = N x ′ ρ ( y . . + ω ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More