

Humanoid flexible mechanical arm device
A dexterous hand and mechanical technology, applied in the directions of manipulators, joints, chucks, etc., can solve the problems of increasing the difficulty of kinematics and dynamics analysis of multi-fingered hands, and increasing the difficulty of control system research.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific structure and working principle of the present invention will be further described below in conjunction with the accompanying drawings.
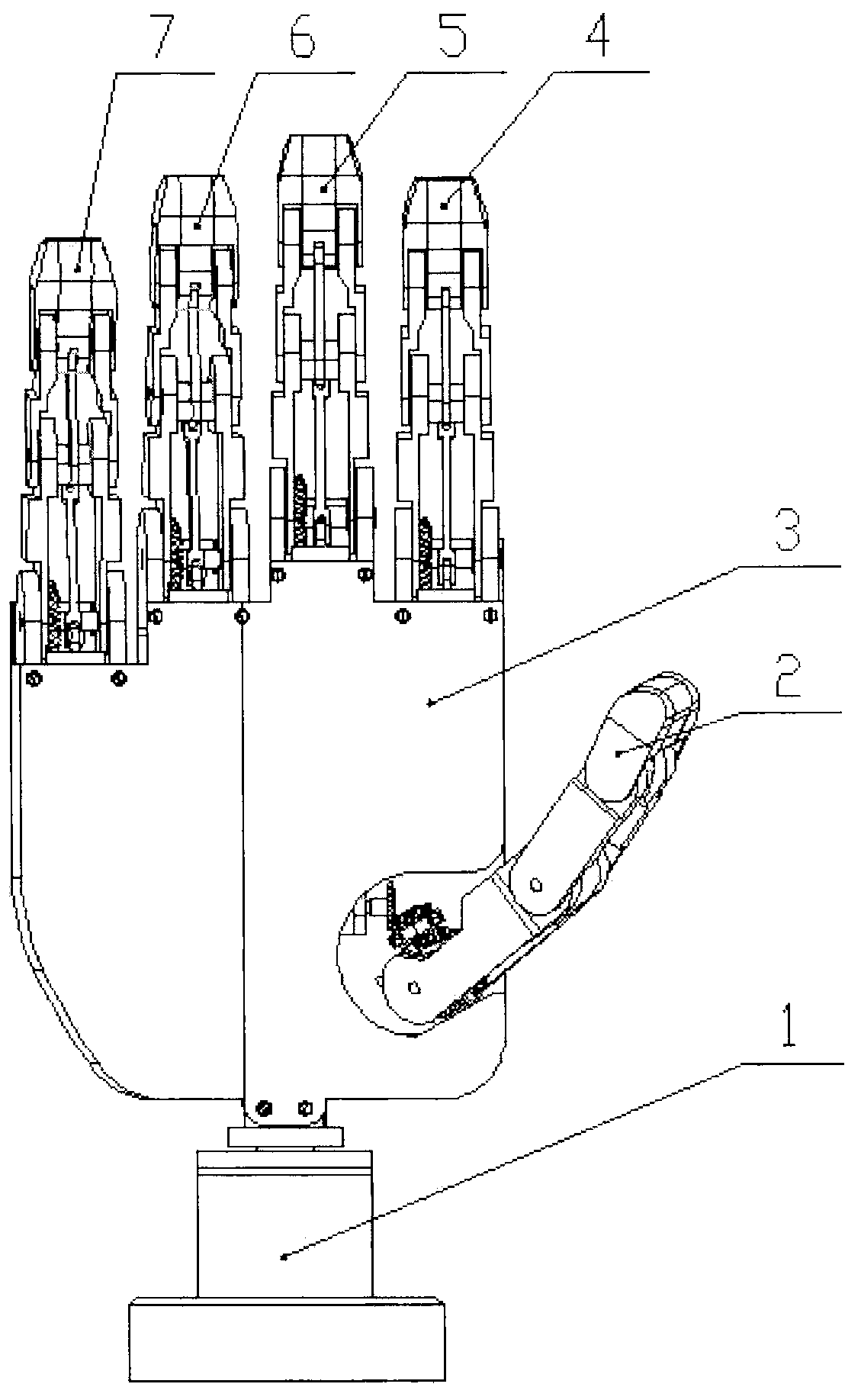
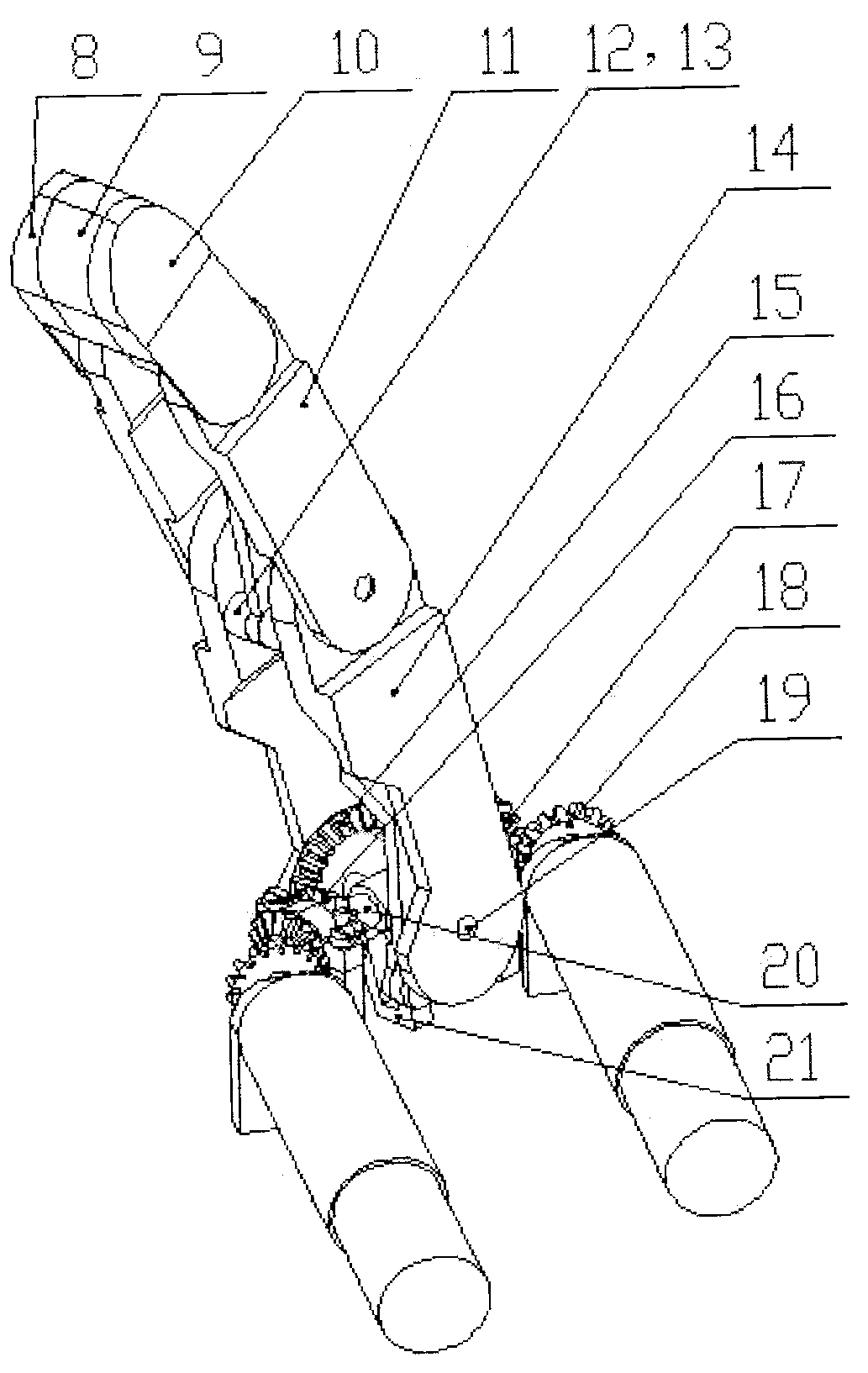
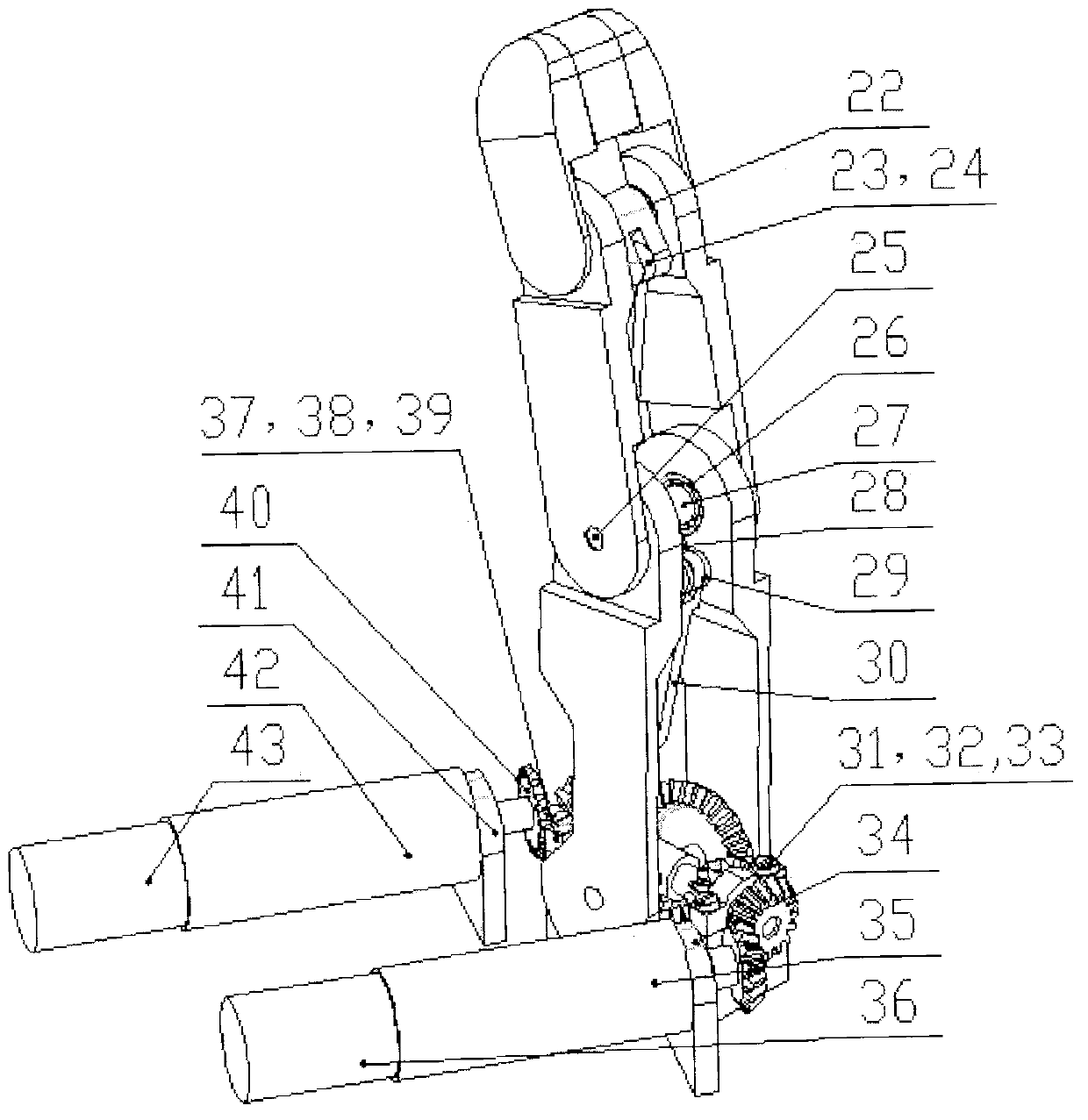
[0023] The present invention is a humanoid mechanical dexterous hand device, such as figure 1As shown, it includes mechanical interface 1 , thumb 2 , palm 3 , index finger 4 , middle finger 5 , ring finger 6 , and little finger 7 . The appearance and schematic diagram of the thumb of the present invention are shown in Figure 2 (a, b, c), and the transmission system of the thumb base joint is shown in Figure 3 (a, b). The appearance and schematic diagram of the index finger of the present invention are shown in Fig. 4 (a, b, c). The outward appearance of the finger of example of the present invention and arrangement relation are as Figure 5 shown. The schematic diagram of the coupling four-link movement of the present invention is as follows: Figure 6 shown. In addition, the structure and working principle of the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More