

High-fault-tolerance controller area network (CAN) bus digital gateway based on double digital signal processors (DSPs)
A CAN bus, high fault-tolerant technology, applied in the field of CAN bus gateway, can solve the problems of communication interruption, data frame loss, large delay, etc., and achieve the effect of reducing impact, enhancing speed and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
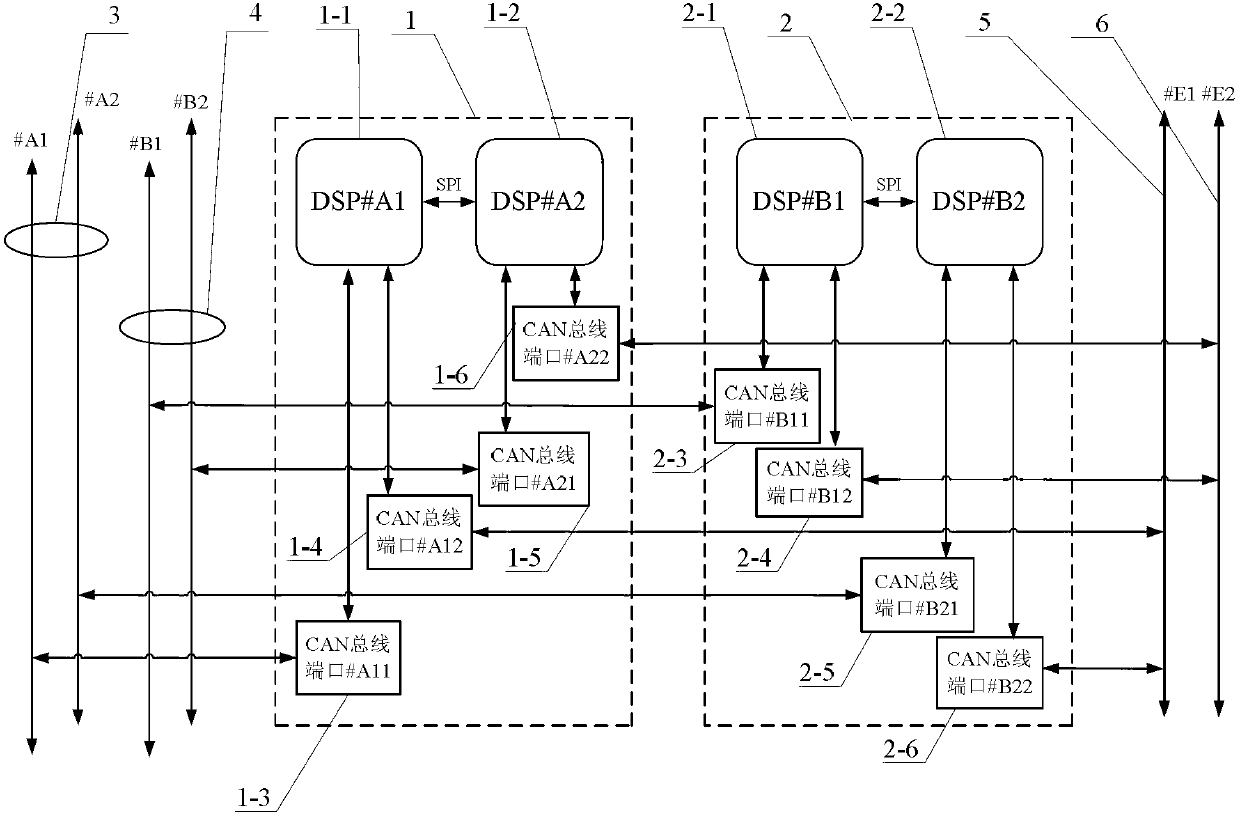
[0039] Specific implementation mode one: the following combination figure 1 Describe this embodiment, the high fault-tolerant CAN bus digital gateway based on dual DSP described in this embodiment, it includes master node 1, slave node 2, dual-channel redundant CAN network A3, dual-channel redundant CAN network B4, non-redundant Remaining sub-network bus #E15 and non-redundant sub-network bus #E26,
[0040] Dual redundant CAN network A3 includes network bus #A1 and network bus #A2;
[0041] Dual redundant CAN network B4 includes network bus #B1 and network bus #B2;
[0042] Master node 1 includes DSP#A11-1, DSP#A21-2, CAN bus port #A111-3, CAN bus port #A121-4, CAN bus port #A211-5 and CAN bus port #A221-6;
[0043]Slave node 2 includes DSP#B12-1, DSP#B22-2, CAN bus port #B112-3, CAN bus port #B122-4, CAN bus port #B212-5 and CAN bus port #B222-6;
[0044] Data is transmitted between DSP#A11-1 and DSP#A21-2 through SPI data channel, DSP#A11-1 is connected to network bus #A1...
specific Embodiment approach 2
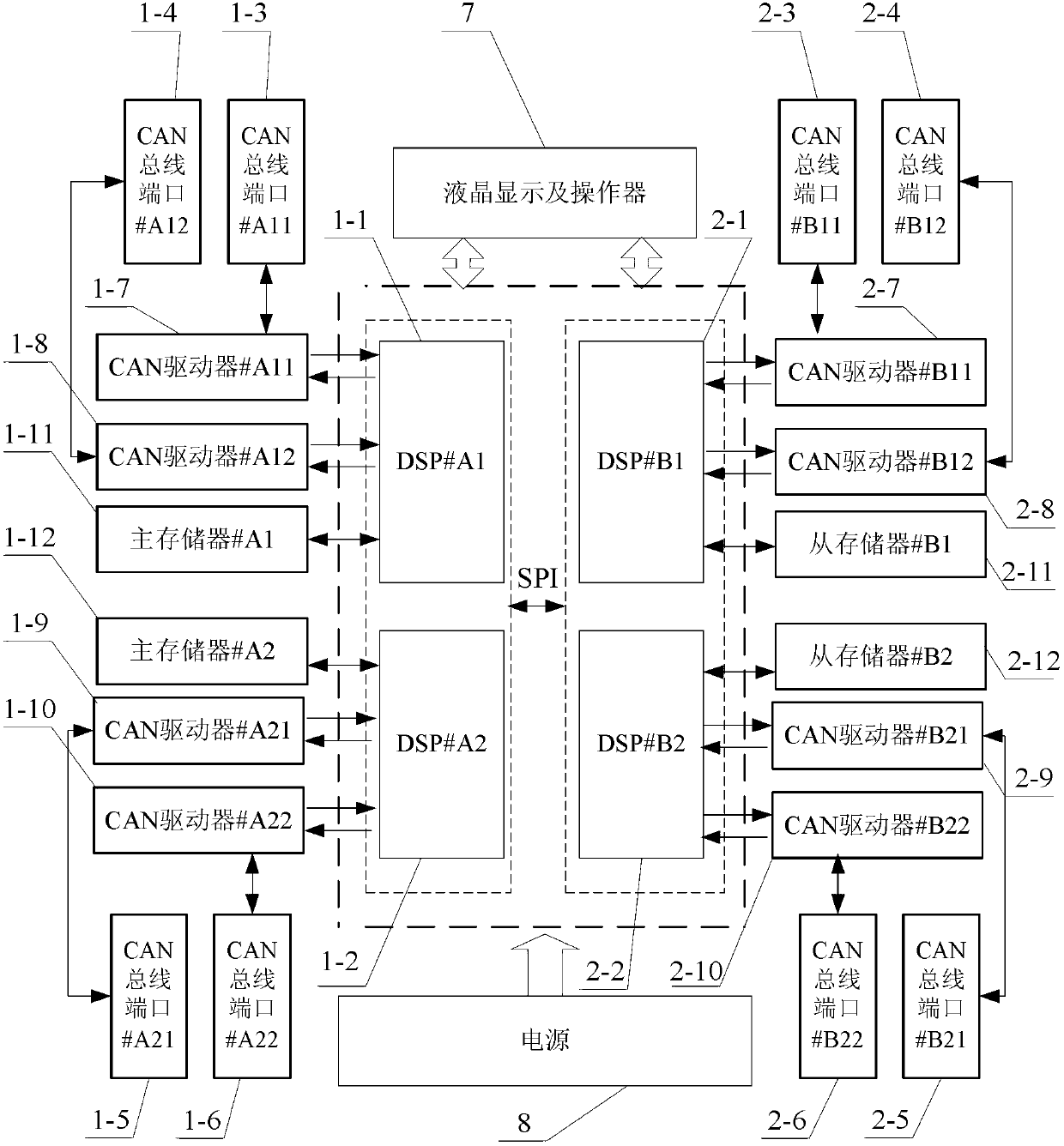
[0049] Specific implementation mode two: the following combination figure 1 with figure 2 Describe this embodiment, this embodiment will further explain Embodiment 1, the master node 1 described in this embodiment also includes CAN driver #A111-7, CAN driver #A121-8, CAN driver #A211-9 and CAN driver #A221 -10,
[0050] CAN driver #A111-7 is set between DSP#A11-1 and CAN bus port #A111-3, CAN driver #A121-8 is set between DSP#A11-1 and CAN bus port #A121-4, CAN driver #A211-9 is set between DSP#A21-2 and CAN bus port #A211-5, CAN driver #A221-10 is set between DSP#A21-2 and CAN bus port #A221-6;
[0051] Slave node 2 also includes CAN driver #B112-7, CAN driver #B122-8, CAN driver #B212-9 and CAN driver #B222-10,
[0052] CAN driver #B112-7 is set between DSP#B12-1 and CAN bus port #B112-3, CAN driver #B122-8 is set between DSP#B12-1 and CAN bus port #B122-4, CAN driver #B212-9 is set between DSP#B22-2 and CAN bus port #B212-5, CAN driver #B222-10 is set between DSP#B22-2...
specific Embodiment approach 3
[0054] Specific implementation mode three: the following combination figure 2 Describe this embodiment, this embodiment will further explain Embodiment 2, the master node 1 in this embodiment also includes a main memory #A11-11 and a main memory #A21-12,
[0055] The main memory #A11-11 is connected with the DSP#A11-1 through the external expansion interface, and the main memory #A21-12 is connected with the DSP#A21-2 through the external expansion interface;
[0056] Slave node 2 also includes from memory #B12-11 and from memory #B22-12,
[0057] The slave memory #B12-11 is connected with the DSP#B12-1 through the external expansion interface, and the slave memory #B22-12 is connected with the DSP#B22-2 through the external expansion interface.
[0058] The two DSPs are interconnected through the SPI serial port, which not only provides data exchange at a rate of up to 10M / b, but also takes into account the anti-interference and reliability of transmission. The CAN driver ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More