

System and method for controlling underground coal mine rescue robot
A control system and underground rescue technology, applied in mining devices, mining equipment, earth-moving drilling and other directions, can solve problems such as hindering the development of underground rescue robots in coal mines, low wireless communication bandwidth, easy scattering and absorption, etc., to improve control accuracy and real-time performance, improve transmission capacity and transmission speed, improve reliability and intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
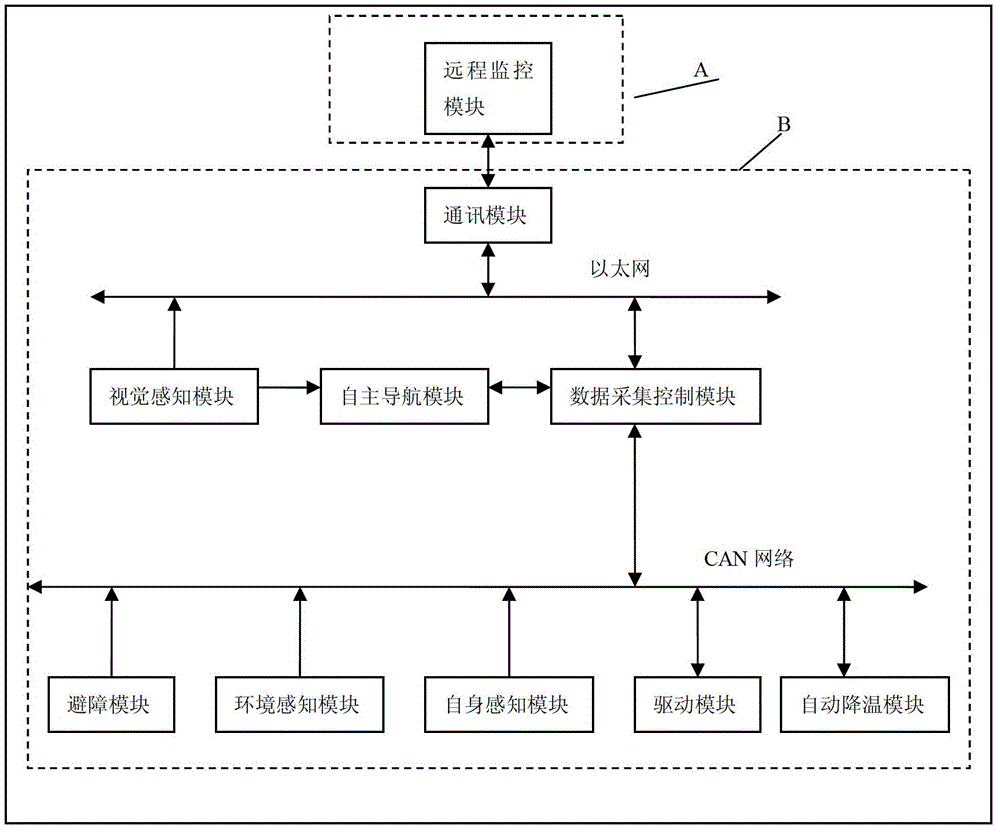
[0041] Such as figure 1 As shown in the figure, a coal mine underground rescue robot control system is divided into a remote control terminal and a robot body end, wherein wire frame A is the remote control end, and wire frame B is the robot body end. Specifically, it includes the following components:
[0042] Communication module: including long-distance communication optical fiber transceiver device, wireless module, double-core flame-retardant optical fiber, optical fiber retractable device, the transmission distance of long-distance communication optical fiber transceiver device can reach tens of kilometers, with video, data, Ethernet and other interfaces The core flame-retardant optical fiber conducts information communication through the wireless module and the remote control terminal. The optical fiber retracting device is used to build an optical fiber communication line, and its retracting speed is coordinated and synchronized with the movement of the robot.
[0043...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More