

Three-degree of freedom joint driven by electromagnetic force applied to snake-shaped robot
A snake-like robot and electromagnetic force technology, applied in manipulators, manufacturing tools, joints, etc., can solve problems such as low wear life, complex mechanical structure, and inflexible movements, and achieve low cost, simplified mechanical structure, flipping and climbing simple effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] The present invention will be further described in detail below in conjunction with the accompanying drawings.
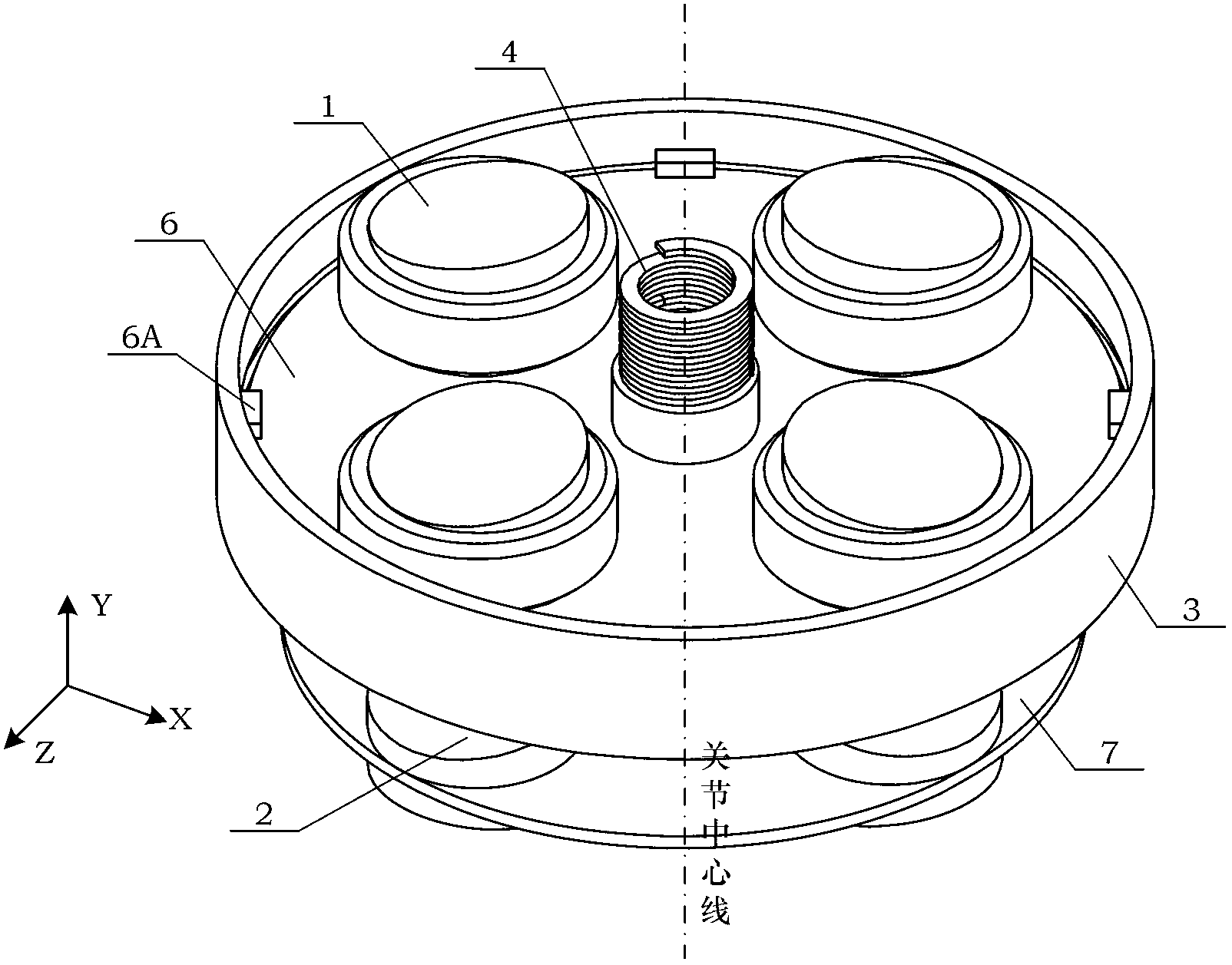
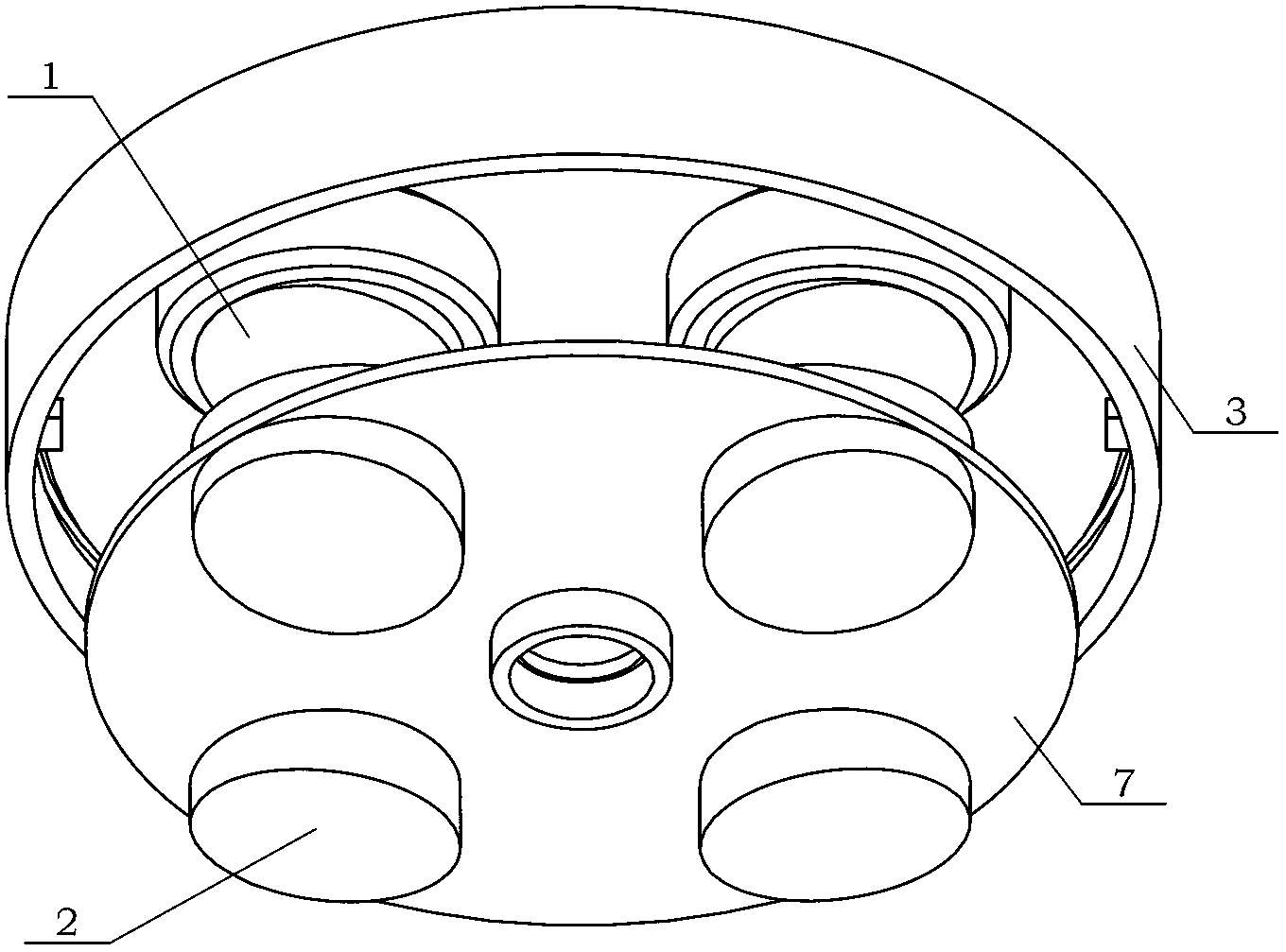
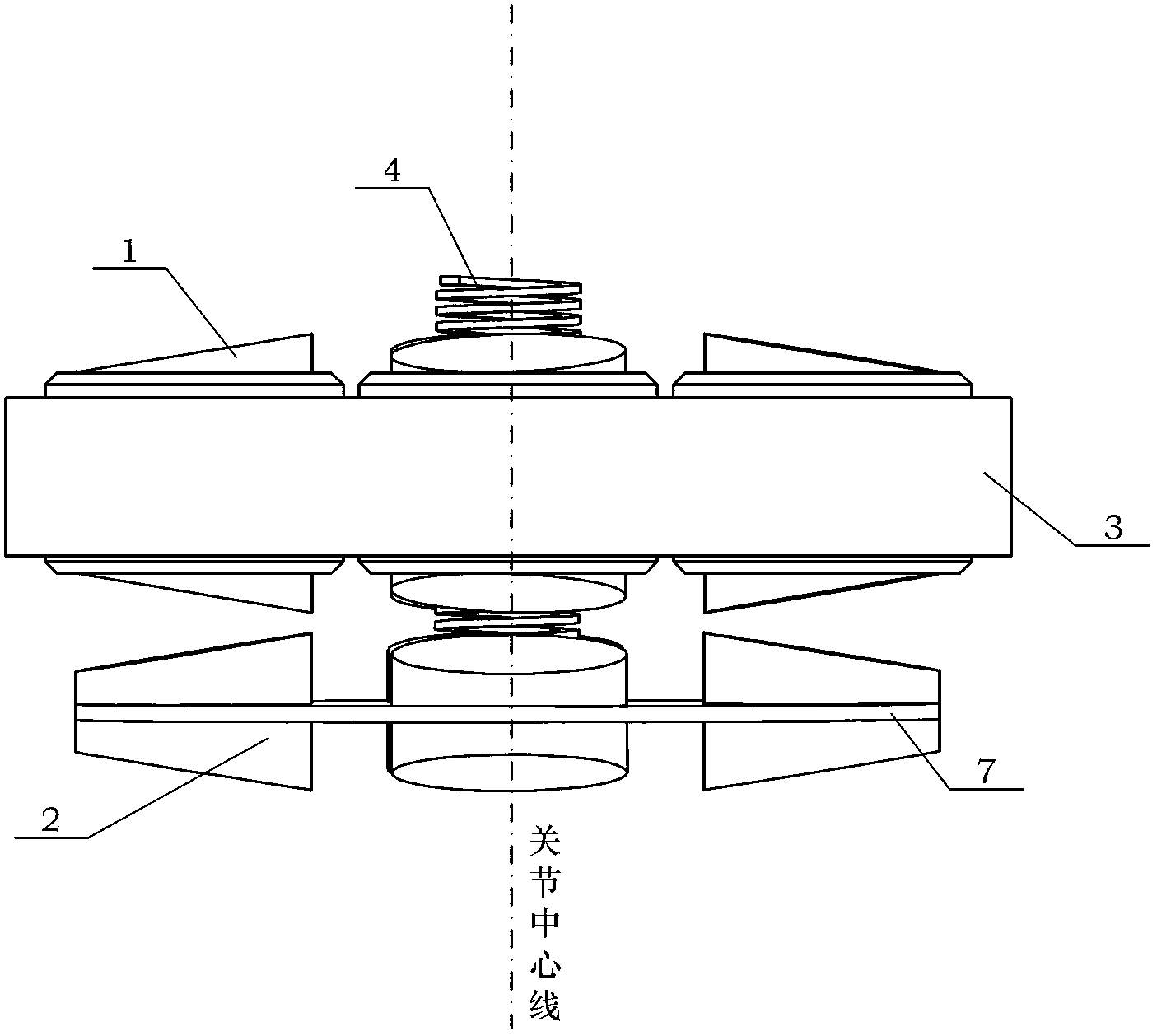
[0068] see figure 1 , Figure 1A , Figure 1B , Figure 1C , Figure 1D As shown, a three-degree-of-freedom snake robot joint driven by electromagnetic force of the present invention includes an electromagnet group 1, a permanent magnet group 2, a tactile detection ring 3, a thrust spring 4, a spring support seat 5, a contact type Switch mounting plate 6 and bracket 7. The thrust spring 4 is placed in the spring supporting seat 5, the electromagnet group 1 and the spring supporting seat 5 are installed on the contact switch mounting plate 6, the tactile detection ring 3 is installed on the outside of the contact switch mounting plate 6, and the permanent magnet group 2 is installed on bracket 7. The rolling motion of the joint mechanism designed in the present invention around the Y axis is called the first degree of freedom motion, the elongation or co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More