

Visual-sense-based aircraft position and attitude determination method under mark-free environment
A determination method and aircraft technology, applied in the field of computer vision, can solve problems such as inapplicability and lack of geographic information, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
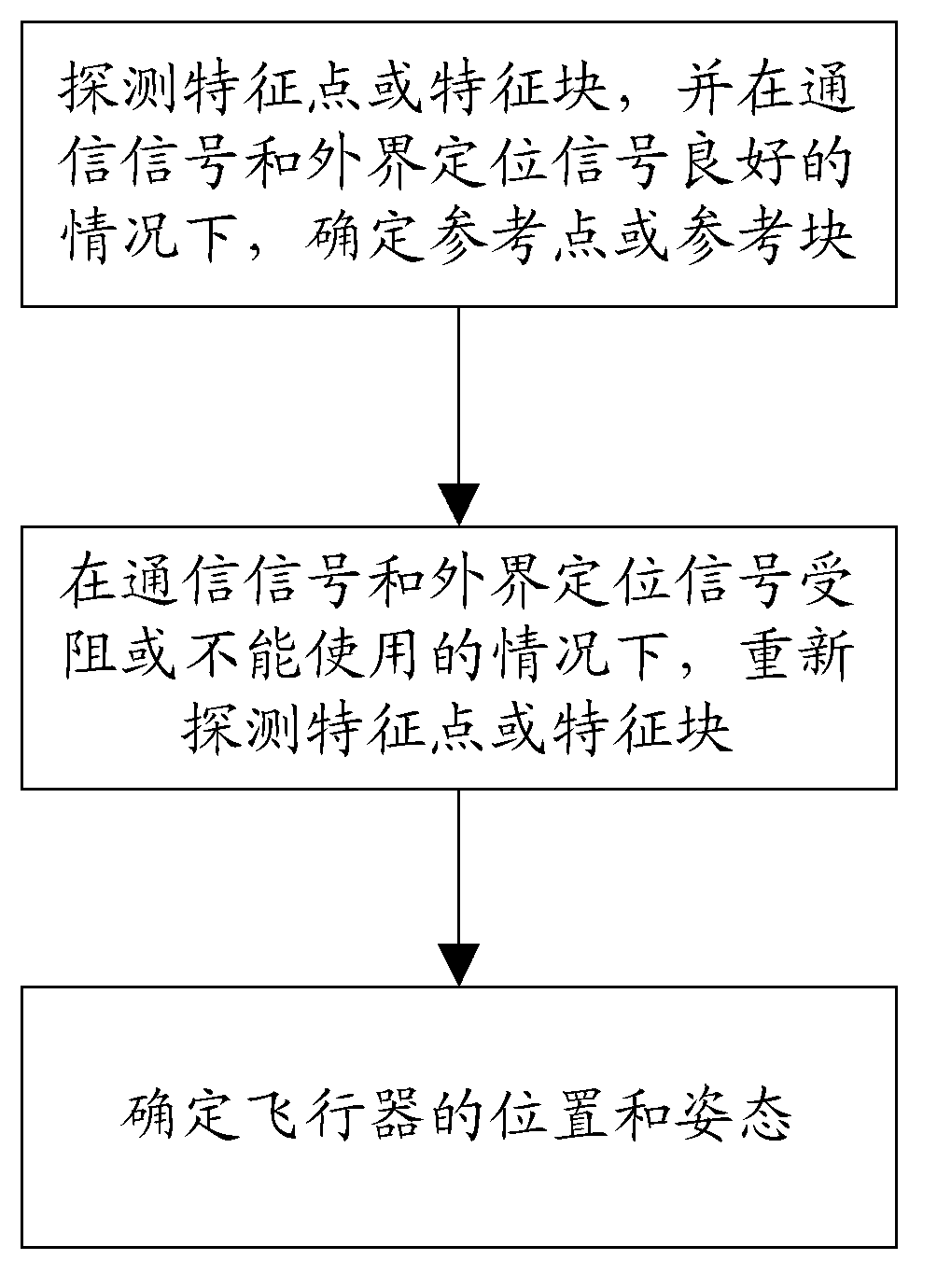
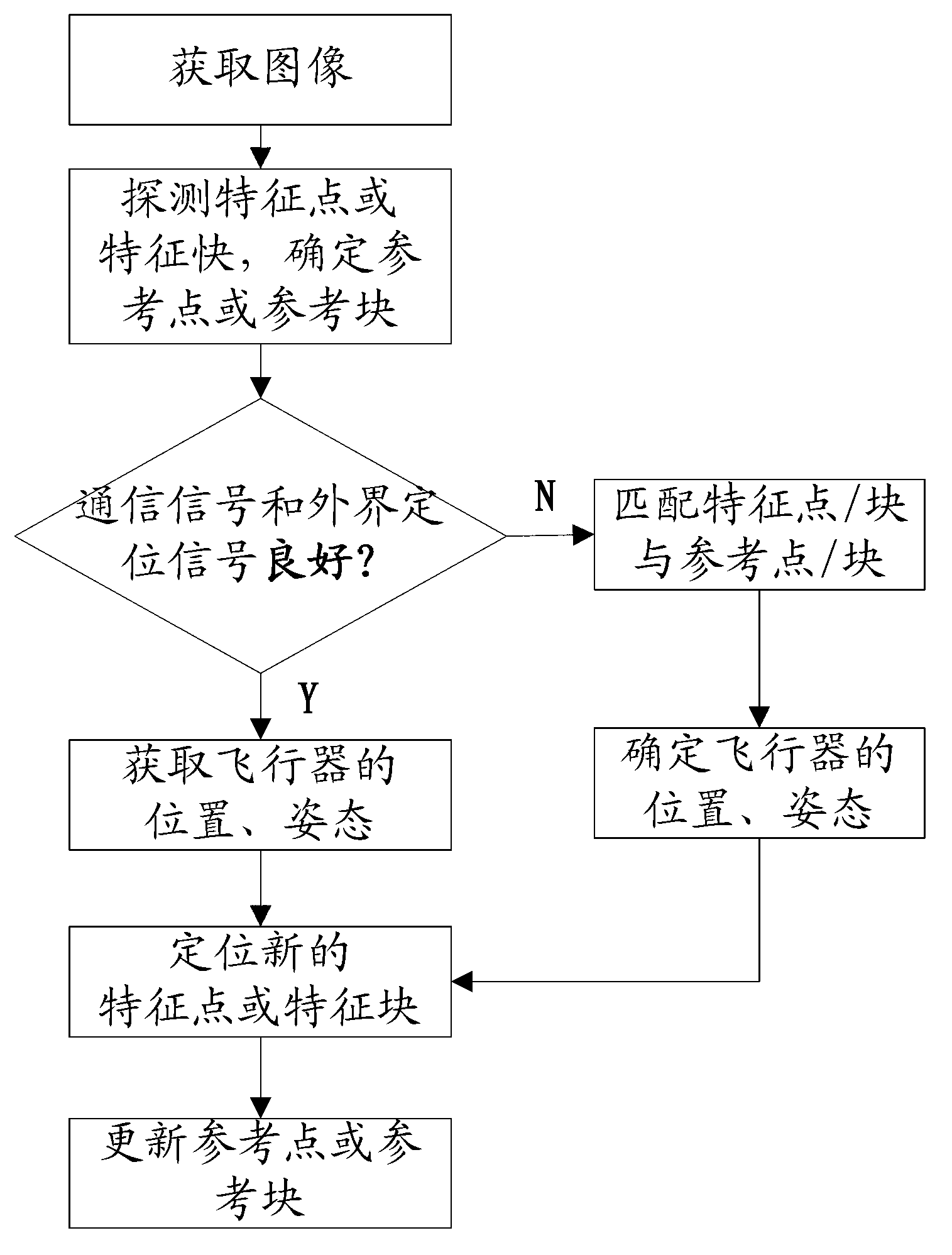
[0019] figure 1 It is a flow chart of the method for determining the position and attitude of an aircraft based on vision in an unmarked environment of the present invention. As can be seen from the figure, the method for determining the position and attitude of an aircraft based on vision in an unmarked environment includes the following steps:
[0020] S1: Detect feature points or feature blocks, and determine reference points or reference blocks when the communication signal and external positioning signal are good;
[0021] S2: When...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More