

Image-vision-based automatic calibration method of clean robot
A calibration method and image vision technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of clean environment damage and calibration errors, and achieve the effect of high degree of automation and accurate calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
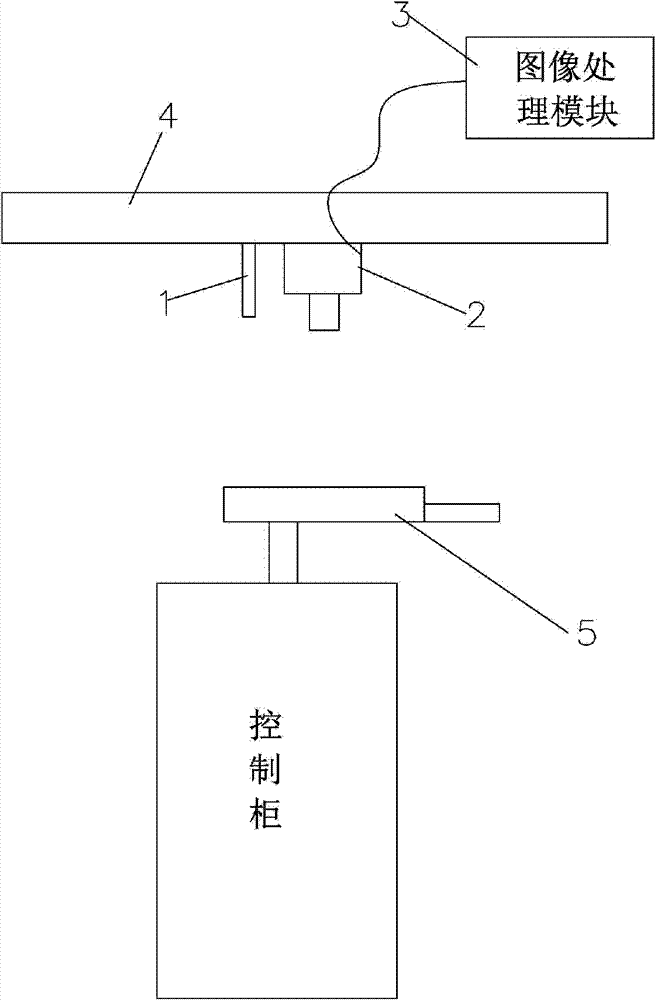
[0021] refer to figure 1 As shown, the present invention discloses an automatic calibration method for cleaning robots based on image vision. The calibration device includes: a laser transmitter 1, a camera 2 and an image processing module 3, wherein:
[0022] The laser emitter 1 and the camera 2 are fixedly arranged on a fixed platform 4 . The distance between them is fixed, and the laser beam of the laser emitter 1 is just perpendicular to the fixed platform 4 .
[0023] After the camera 2 takes a picture, it is processed by the processing module 3 .
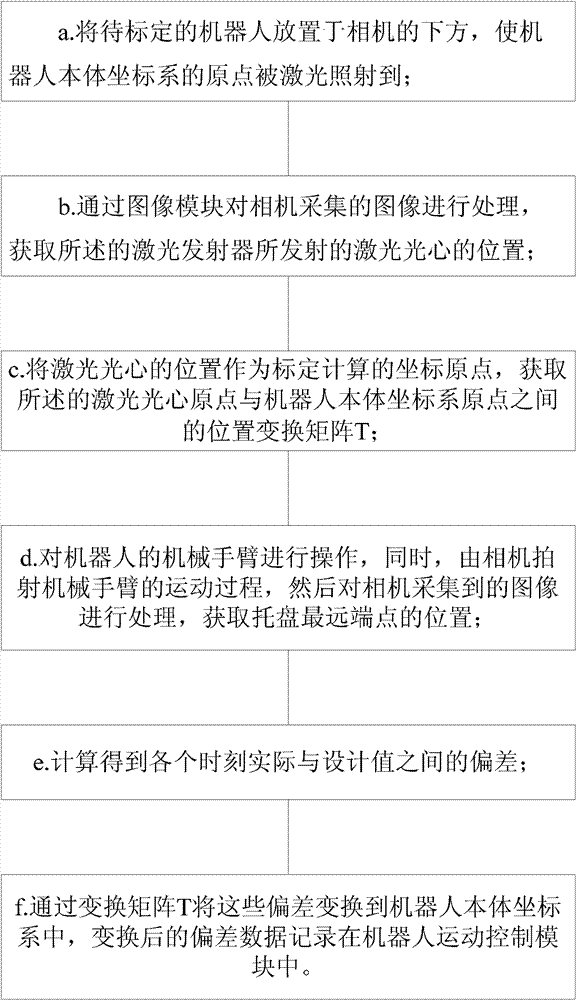
[0024] Such as figure 2 As shown, the c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More