

Method and device for robot controller pulse synchronous adjustment
A pulse synchronization and adjustment method technology, applied in computer control, control/regulation system, program control, etc., can solve problems affecting robot positioning accuracy, code loss, motor operation fluctuations, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
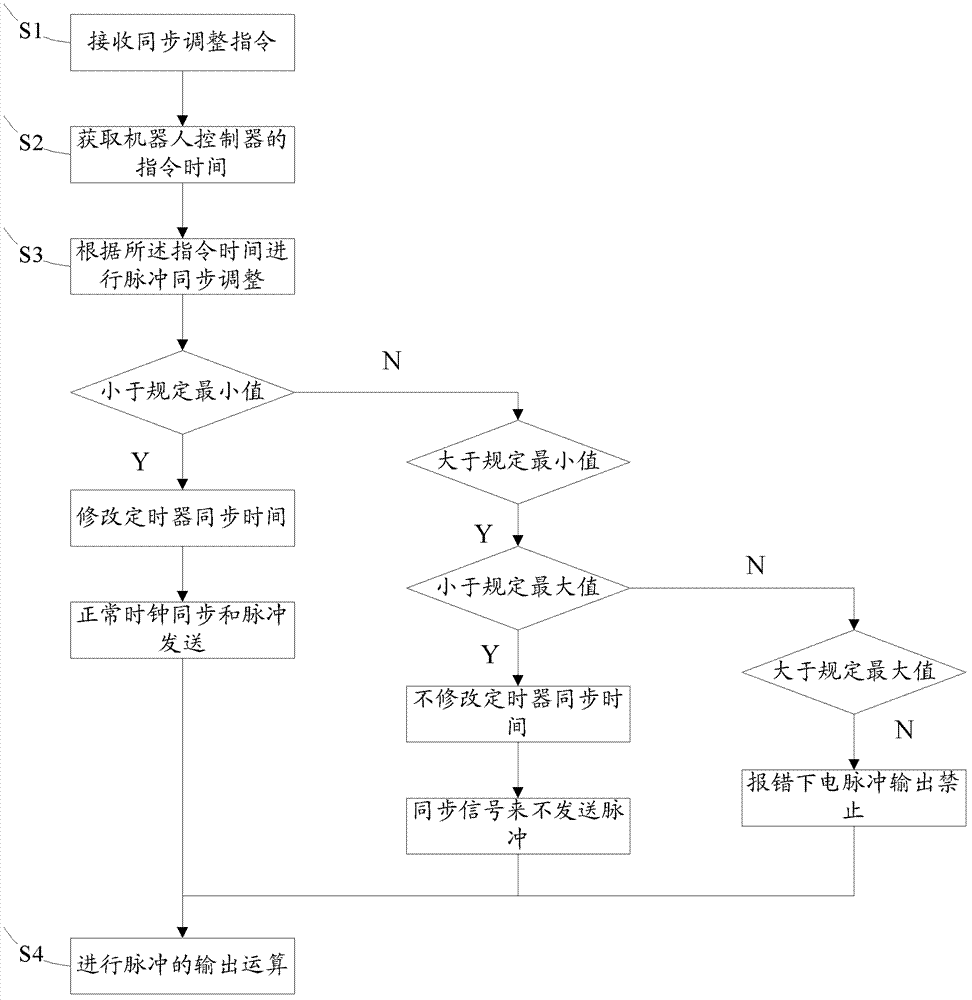
[0025] see figure 1 , the flow process of the synchronous adjustment mechanism of the preferred embodiment of the robot controller pulse synchronous adjustment method of the present invention, the specific steps are as follows:
[0026] Step S1, receiving an instruction for synchronous adjustment sent by the robot controller.
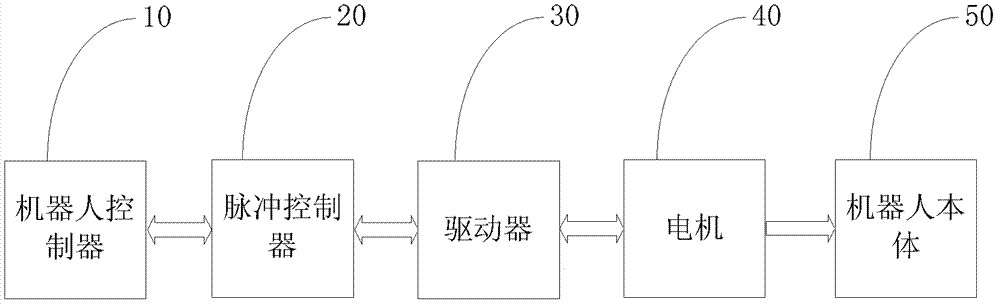
[0027] Specifically, define variables T1CNT_old, T1CNT_new, N (N is the pulse output beat number). The internal timer operation of the event manager is prohibited during system initialization. When the robot controller 10 sends a power-on instruction, the timer is enabled, and at this time, the count register assigns the count value to the variable T1CNT_old. After the pulse controller receives the instruction for synchro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More