

Pneumatic serial-connection flexible hinge multi-finger paw of compliant mechanism
A technology of flexible hinges and compliant mechanisms, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of series flexible hinges that are difficult to bend, increase series flexible hinges, and small slope of the curve, etc., to reduce the minimum cross-sectional area, reduce the Minimum cross-sectional area, the effect of reducing the force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
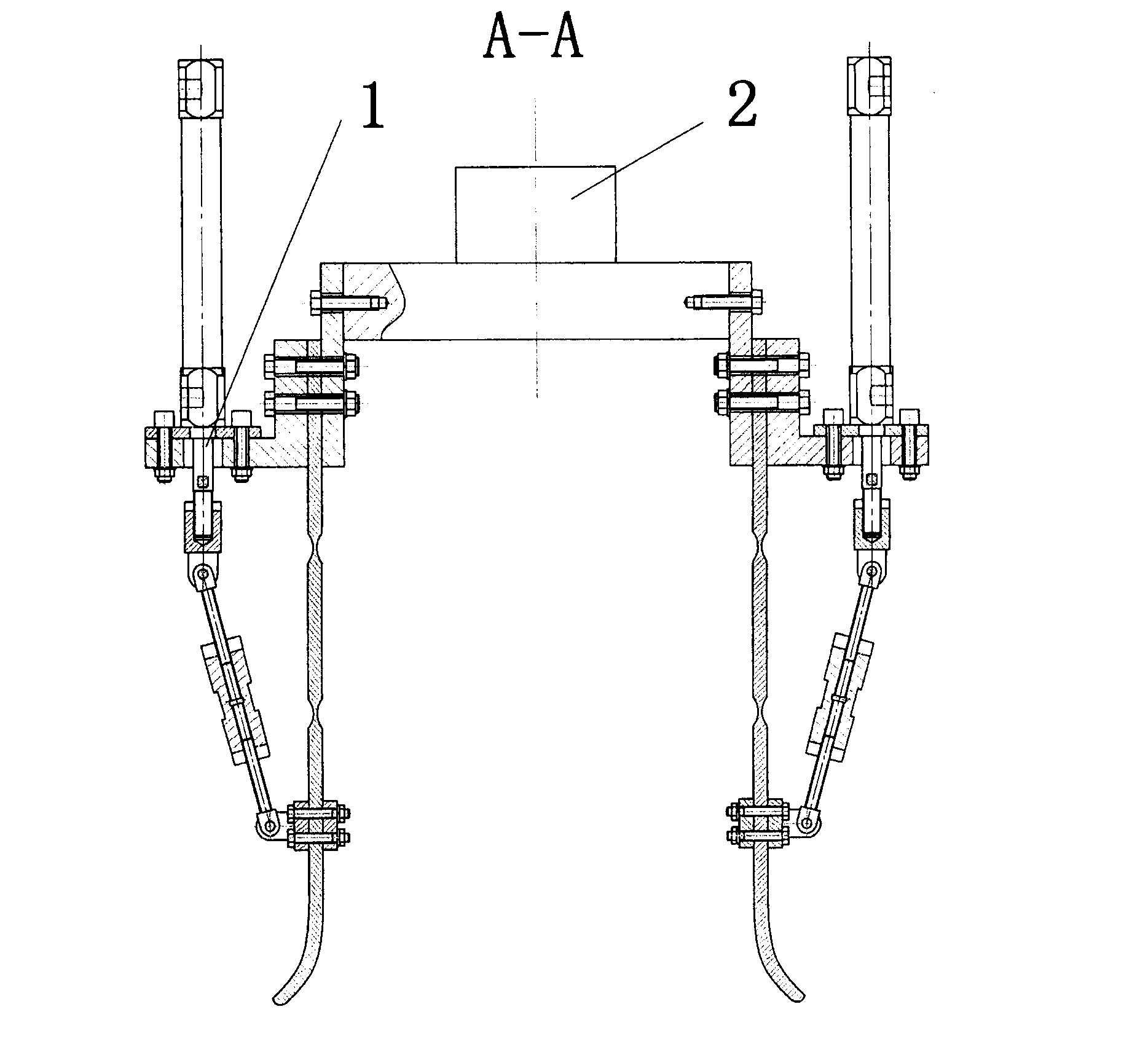
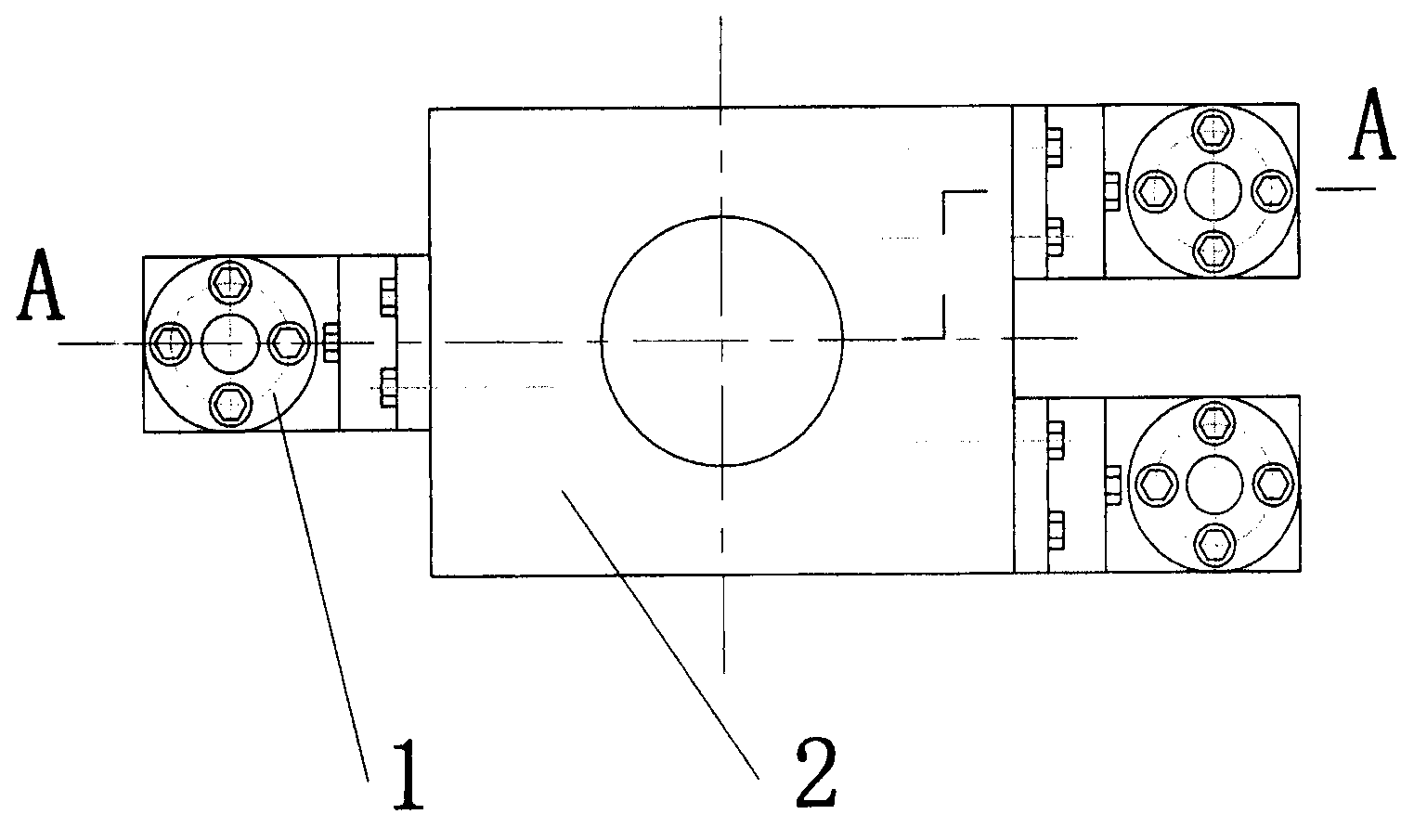
[0022] Below is working principle and working process of the present invention:
[0023] Such as figure 1 , 2 As shown, according to the long and rectangular complex objects, after experimental research and theoretical analysis, adjust the length of the two force rods (composed of the left threaded hinge rod 7a, the threaded sleeve 8a, and the right threaded hinge rod 8a), and then adjust the pressure plate 5a and the hinge The support 6a is fixed at the lower end of the series flexible hinge 4a. The series flexible hinge 4a is driven by the cylinder to produce large deformation. The bottom end of the series flexible hinge 4a clamped by the pressure plate 5a and the hinge support 6a is a curved surface segment, and the grasping of complex objects is on the curved surface segment of the series flexible hinge 4a.
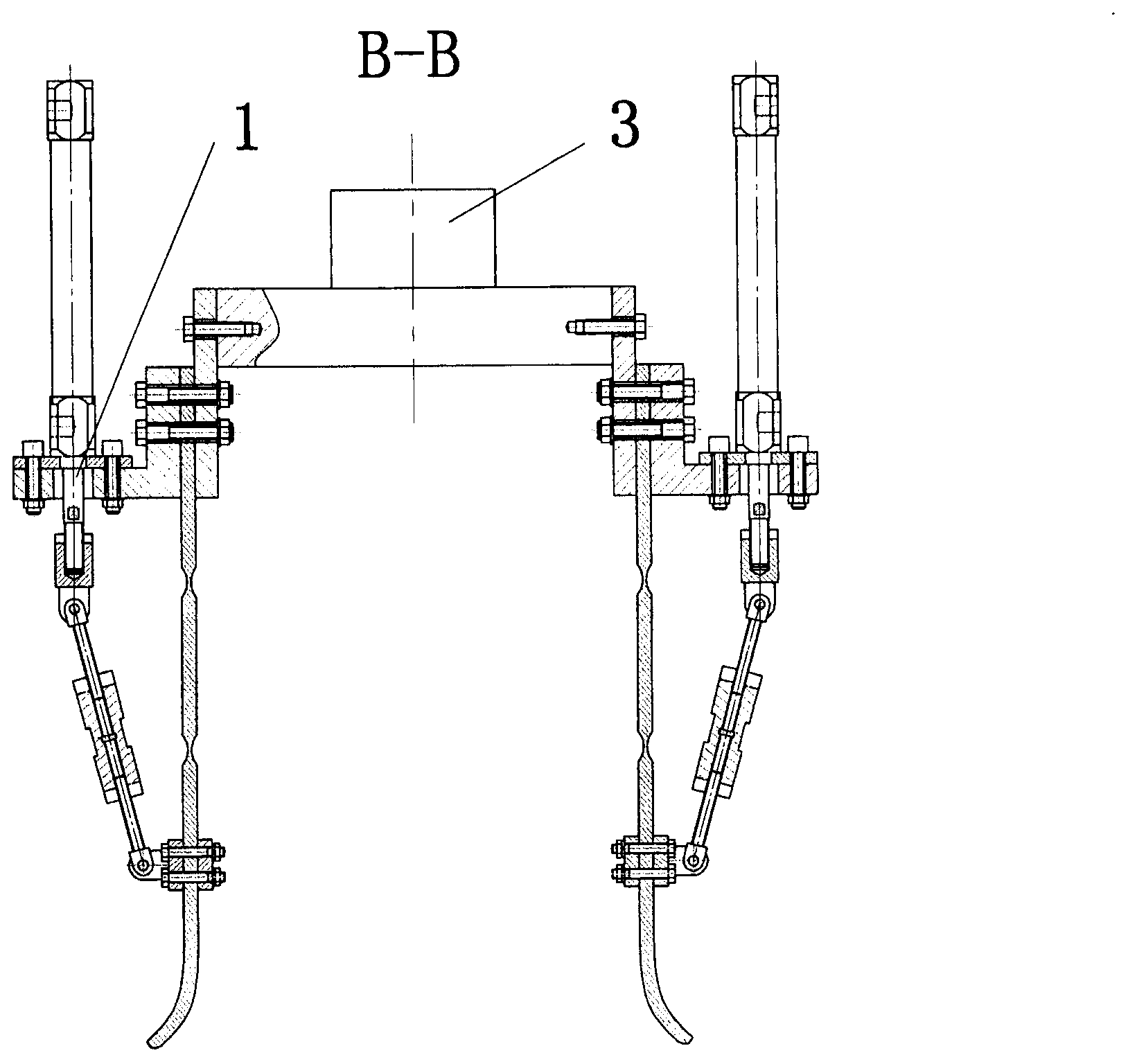
[0024] Such as image 3 , 4 As shown, the circular and short cylindrical complex objects are also regulated according to the above steps, after experimental resea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More