

Method for controlling position of 2R under-actuated plane flexible mechanical arm
A flexible manipulator and control method technology, applied in manipulators, manufacturing tools, etc., can solve the problems of increasing the difficulty of control design and the flexibility of rods that cannot be ignored.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
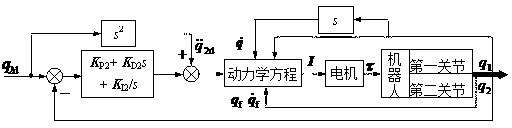
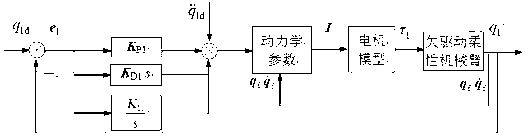
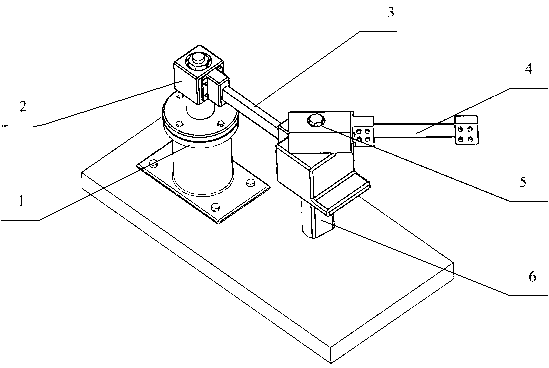
[0066] The specific structure of the 2R underactuated planar flexible manipulator provided by the present invention refers to Figure 6 (1-motor in the figure; 2-first joint; 3-rigid rod; 4-flexible rod; 5-second joint; 6-encoder), the specific steps for position control are as follows, and the control process refers to Figure 7 .
[0067] (1) Establishment of dynamic model
[0068] Taking the 2R underactuated flexible manipulator as the research object, in which the second joint is passive and the second rod is flexible, the dynamic model of the system is established by using the assumed mode method as
[0069] D 11 · q · · 1 + D ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More