

Elbow wrist rehabilitation robot connected in series and parallel
A rehabilitation robot, elbow-wrist technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problem of difficult to achieve comprehensive treatment of elbow and wrist joints, lack of wrist and elbow traction functions, and poor targeting of elbow and wrist joints. and other problems, to achieve the effect of adding additional rehabilitation treatment functions, wide applicability, simple and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
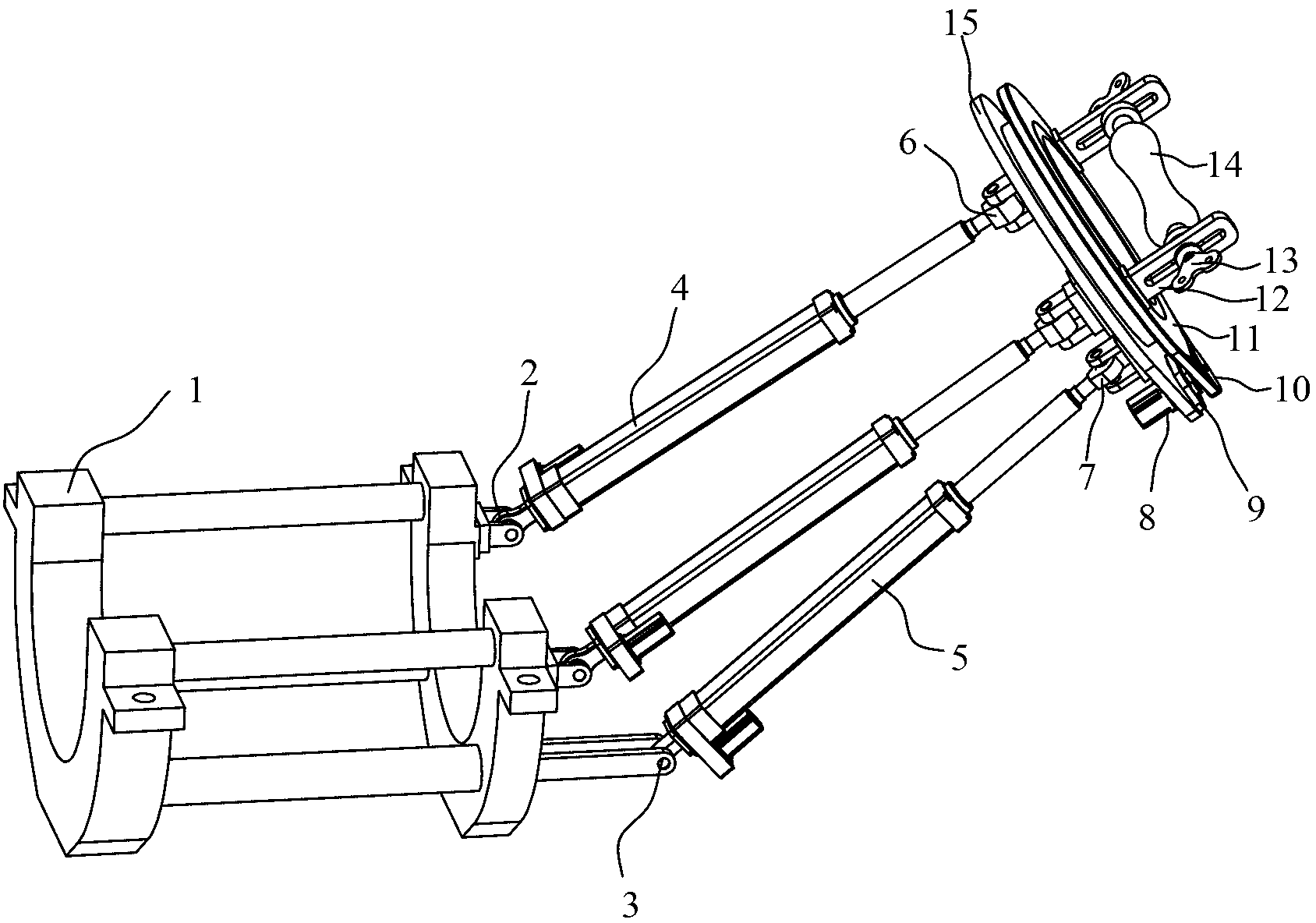
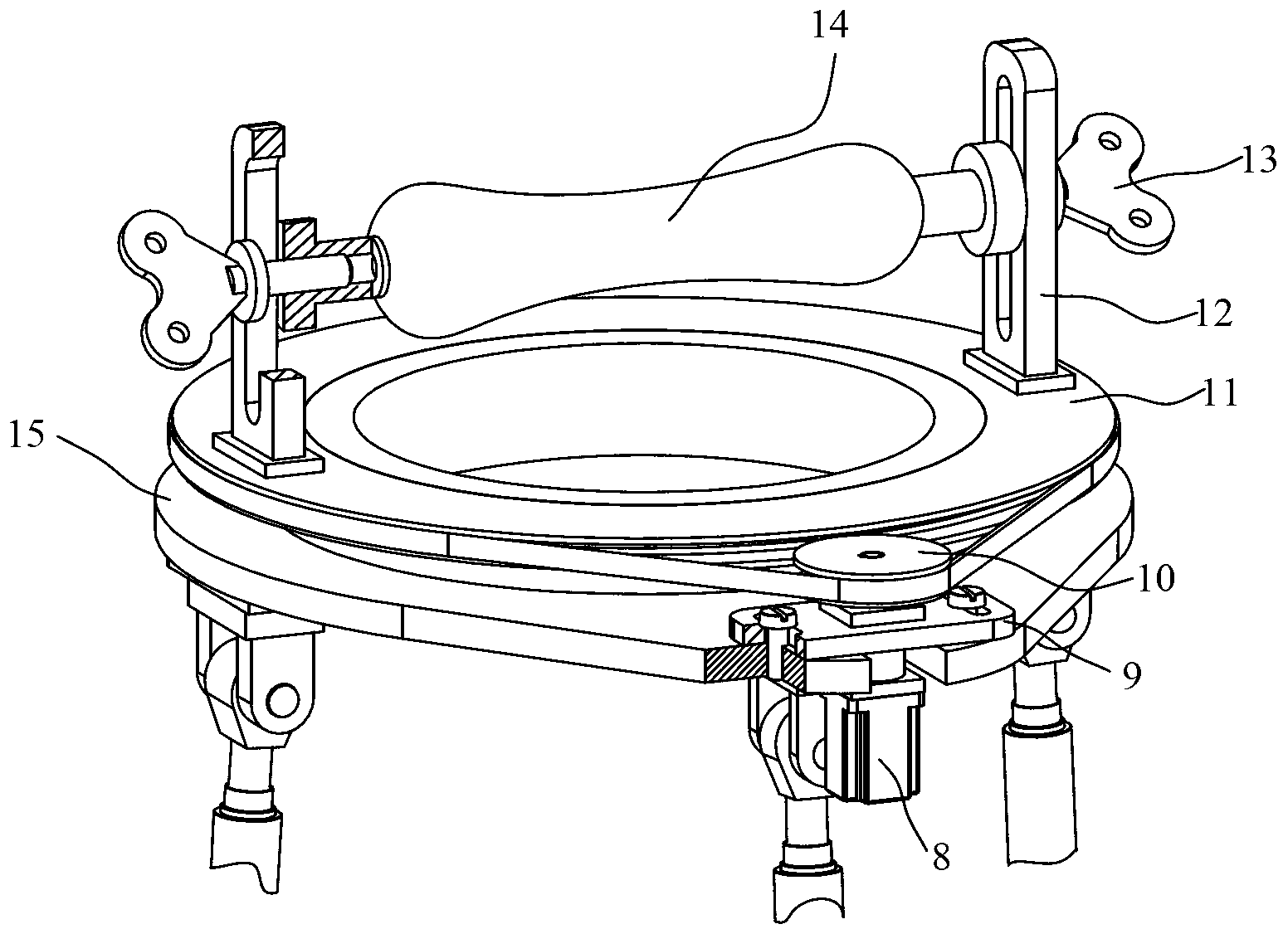
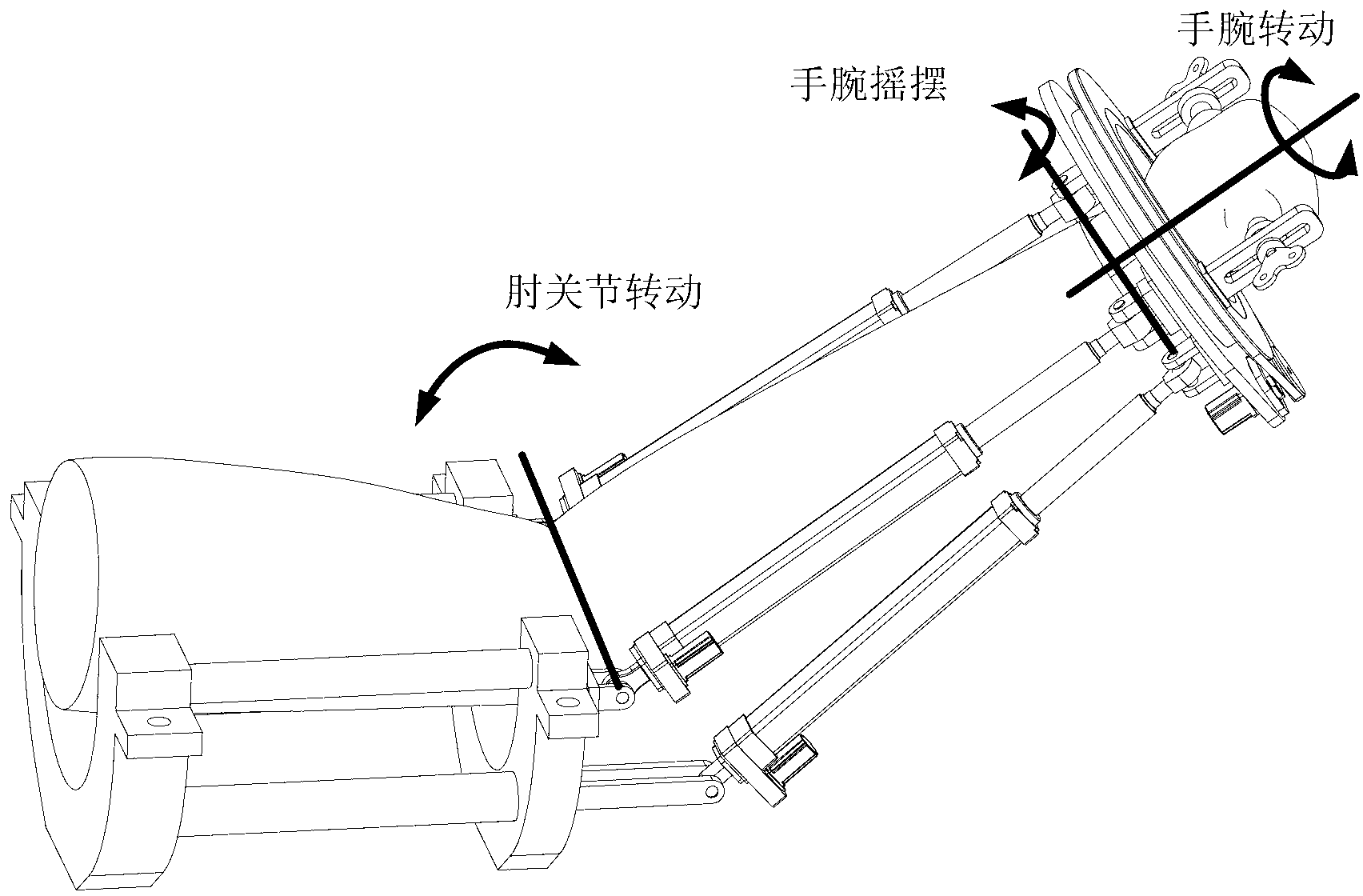
[0013] exist figure 1 with figure 2 In the schematic diagram of the series-parallel hybrid elbow-wrist rehabilitation robot shown, the arm base 1 is formed by connecting two U-shaped bases with 3-4 beams. On the upper part of one end of the U-shaped arm base, two upper motorized One end of the cylinder 4 is symmetrically connected to the boom base through the boom joint ball bearing 2 respectively, and the other ends of the two upper electric cylinders are connected to the annular wrist support 15 through the wrist rotation pair 6 respectively, and the above-mentioned U-shaped large At the bottom of the same end of the arm base, one end of the lower electric cylinder 5 is connected with the boom base through the boom rotating pair 3, and the other end of the lower electric cylinder is connected with the above-mentioned wrist support through the wrist joint ball bearing 7; the above-mentioned boom rotates The secondary axis is parallel to the line connecting the centers of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More