

Exoskeleton walk-assisting robot for old people and bionic control method for anti-falling gaits
A walking aid robot and exoskeleton technology, applied in the field of rehabilitation engineering, can solve problems such as difficulty in applying unstructured complex terrain, lack of flexibility and environmental adaptability, cumbersome dynamic modeling, etc., to avoid falls, The structure of the components is compact and the effect of maintaining balance and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
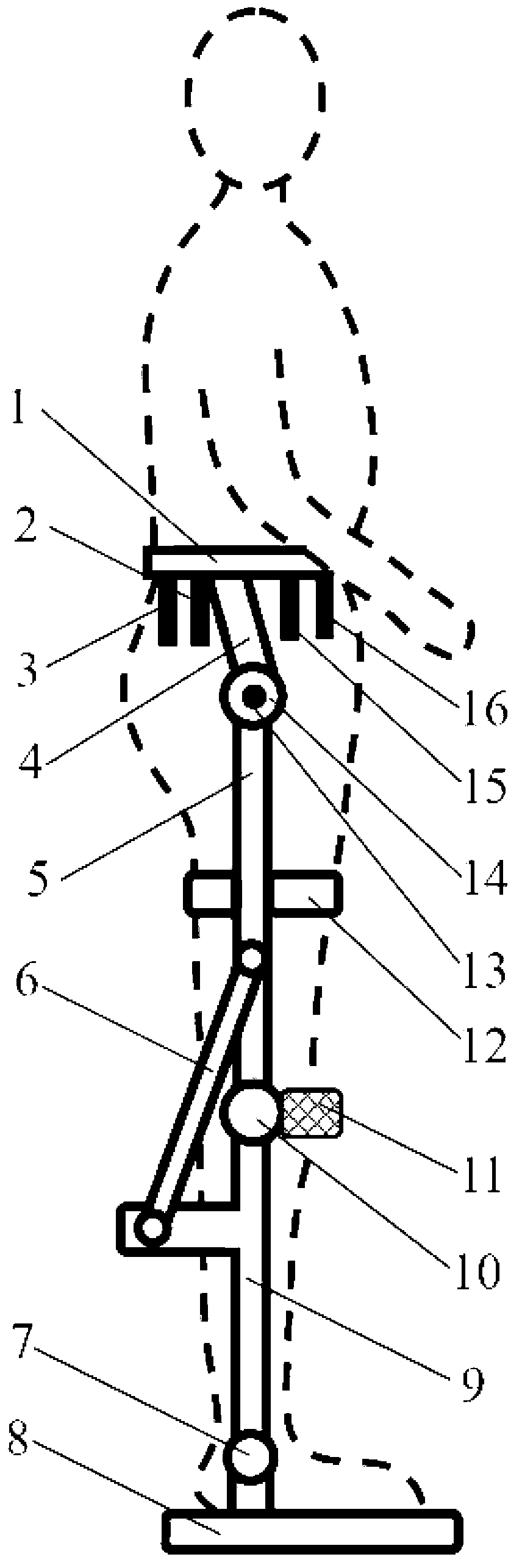
[0031] Embodiment: The exoskeleton walking-aiding robot designed by the present invention adopts existing components or devices, and its structure is compact, and its applicability is strong, and its control method is not limited to the robot mentioned in this design. Acceleration and angular velocity signals, other types of walking-assisted robots that can complete motion generation and motion inversion based on the signals are also applicable.
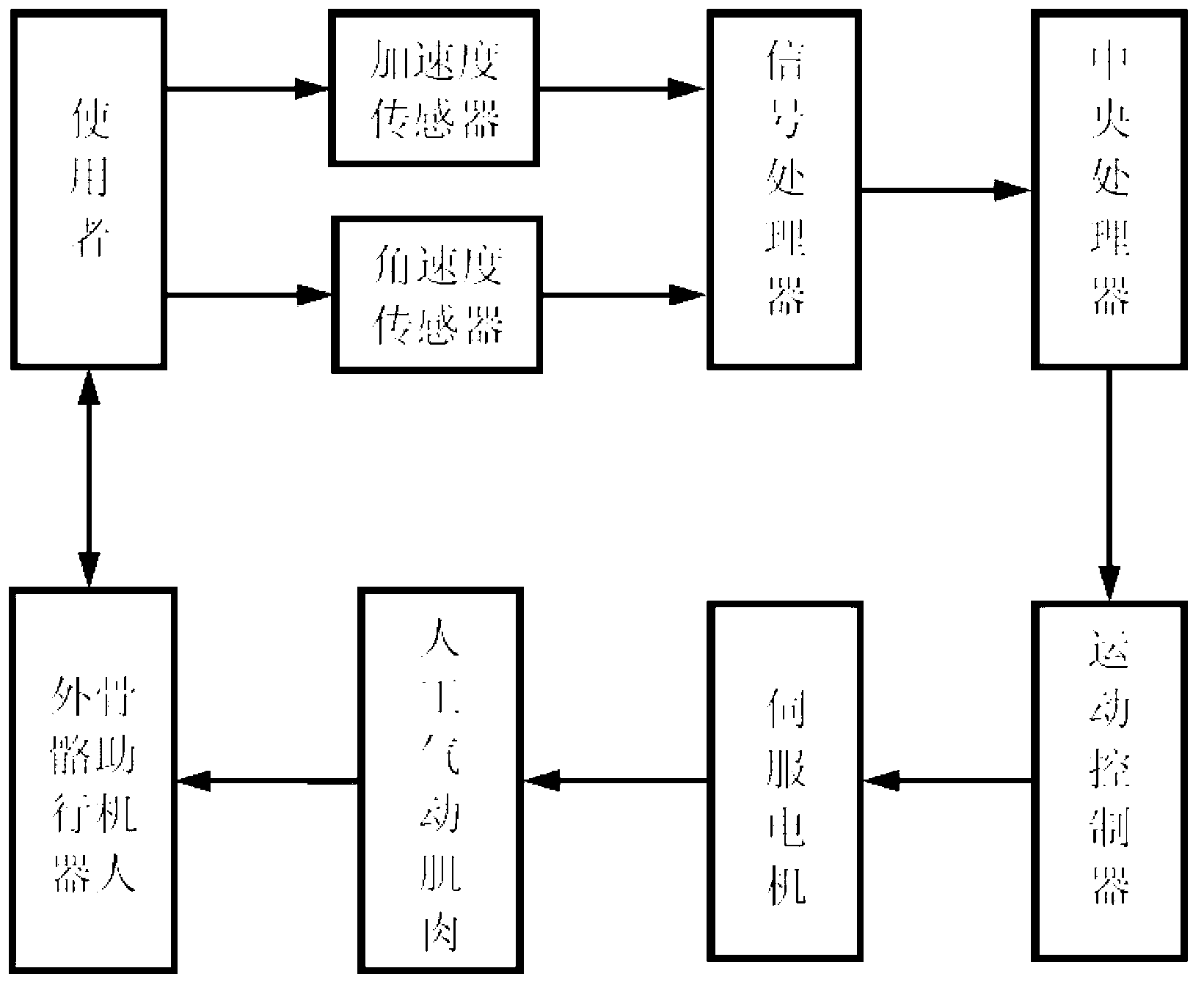
[0032]The action control unit of the present embodiment includes a sensor 16 that can obtain the acceleration and angular velocity of the walking process in real time, and a signal processor 15 that can perform signal conditioning and digital-to-analog conversion on the signal collected by the sensor 16. It is connected with the hip joint component 4 and generates The motion signal controls the motion controller 13 of the hip joint part 4 to perform motion generation and motion inversion, and transmits the motion command to the centra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More