

Lower limb exoskeleton boosting device and control method
A technology of booster device and exoskeleton, which is applied in medical science, artificial leg, prosthesis, etc., to achieve the effect of improving detection accuracy and stable control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with accompanying drawing and example the technical solution of the present invention is further described:
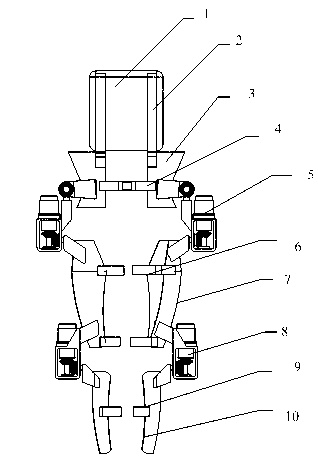
[0021] like figure 1 As shown, a lower limb exoskeleton assisting device includes a synchronous controller 1, a strap 2, a waist pad 3, a waist belt 4, a hip joint 5, a thigh bandage 6, a thigh connecting rod 7, a knee joint 8, a calf bandage 9 and Calf link 10.
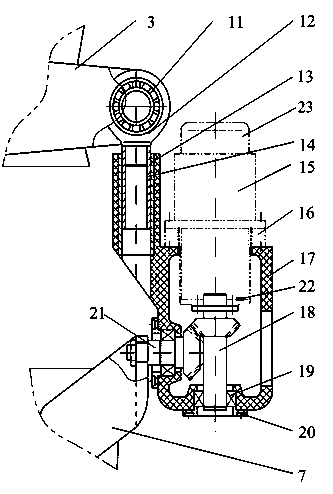
[0022] like figure 2 shown, for figure 1 Sectional view of the hip joint 5 of the middle and lower extremity exoskeleton booster, including the rotating arm 12, the bearing 11, the wear-resistant round sleeve 14, the joint box 17, the wear-resistant bush 13, the harmonic gear 16, the servo motor 15, and the driving worm gear 18. Locating bearing 19, mounting cover 20 and driven worm gear 21.
[0023] In the lower extremity exoskeleton assisting device of the present invention, the thigh connecting rod 7 and the calf connecting rod 10 are connected through the knee joint 8, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More