

A Method for Realizing 3D Positioning of Non-cooperative Bi-Multistatic Radar Targets
A radar target, three-dimensional positioning technology, applied in the direction of reflection/re-radiation of radio waves, use of re-radiation, measurement devices, etc. The effect of fast operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
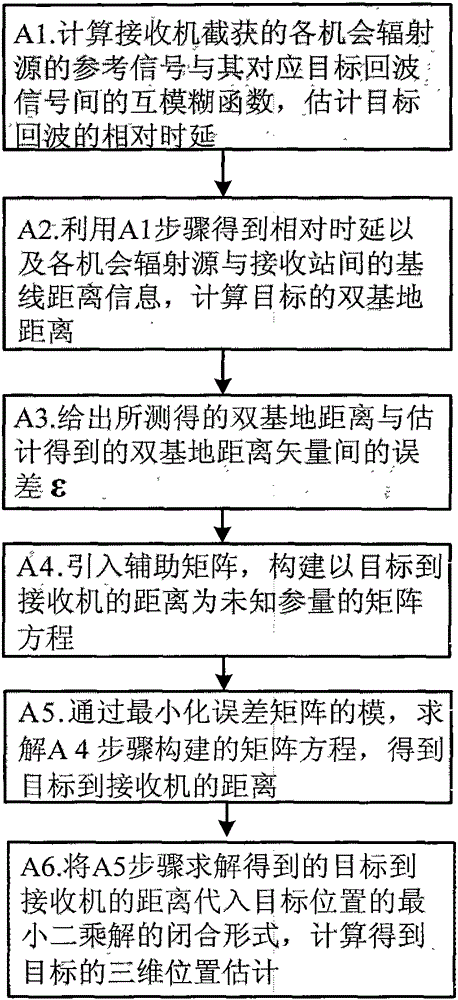
Method used
Image


Examples
Embodiment Construction
[0025] The present invention will be described in further detail below in conjunction with the accompanying drawings.
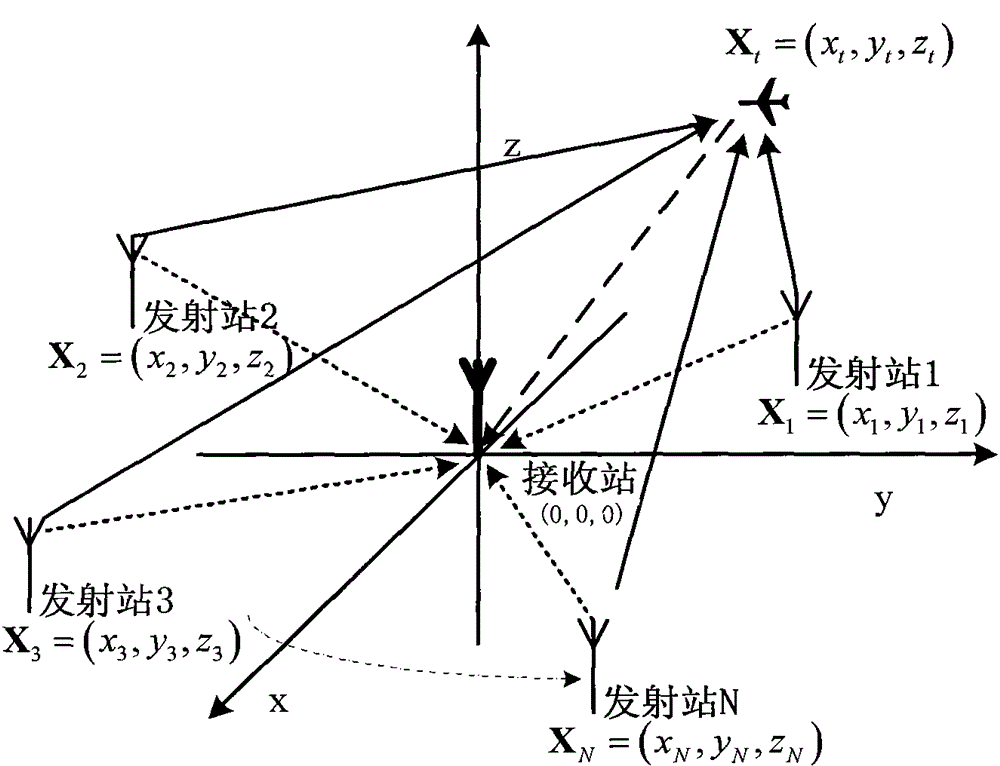
[0026] Such as figure 1 As shown, the non-cooperative dual multistatic radar target three-dimensional positioning system belongs to a multi-station passive positioning system. Generally, it consists of a receiving station and multiple emitting stations of opportunistic radiation sources. N opportunistic radiation sources (N≥3) are distributed in space, and the receiving station detects and locates the target by intercepting the radiation source signal and the direct wave reference signal reflected by the target in the monitoring area of interest;
[0027] Without loss of generality, assume that the position of the receiver is [0, 0, 0] T , the location of the i-th transmitter is [x i ,y i ,z i ] T , where i=1, 2, ..., N. Assuming the target is a point target, its position coordinates are X t =[x t ,y t ,z t ] T , so the distance from the target ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More