

Six- free-degree 3-3 orthogonal type parallel robot
A degree of freedom and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as high manufacturing maintenance costs, environmental pollution, and large dynamic response delays, and achieve pollution-free maintenance costs and good dynamic response characteristics. good isotropic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The embodiments of the present invention are described in detail below: this embodiment is implemented under the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
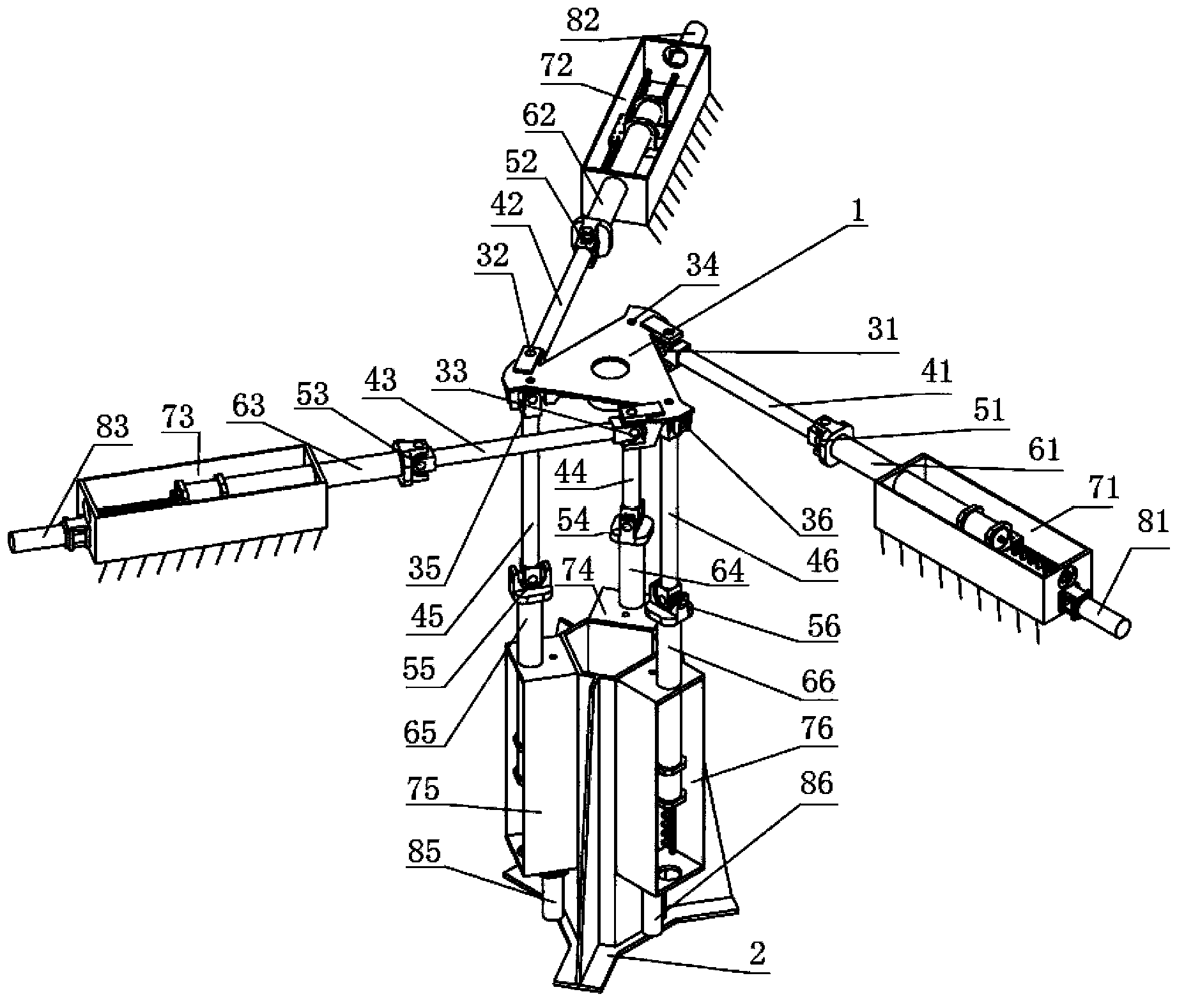
[0033] Such as figure 1 As shown, the present embodiment provides a six-degree-of-freedom 3-3 orthogonal type parallel robot, including a moving platform, a fixed frame, and a mechanical device that is arranged between the moving platform and the fixed frame and connects the moving platform and the fixed frame. A branch chain group, the mechanical branch chain group includes six mechanical branch chains in a 3-3 orthogonal arrangement.
[0034] Further, each of the mechanical branch chains ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More